#include "pinocchio/multibody/model.hpp"#include "pinocchio/algorithm/model.hpp"#include "pinocchio/multibody/sample-models.hpp"#include <iostream>
Include dependency graph for model-generator.hpp:
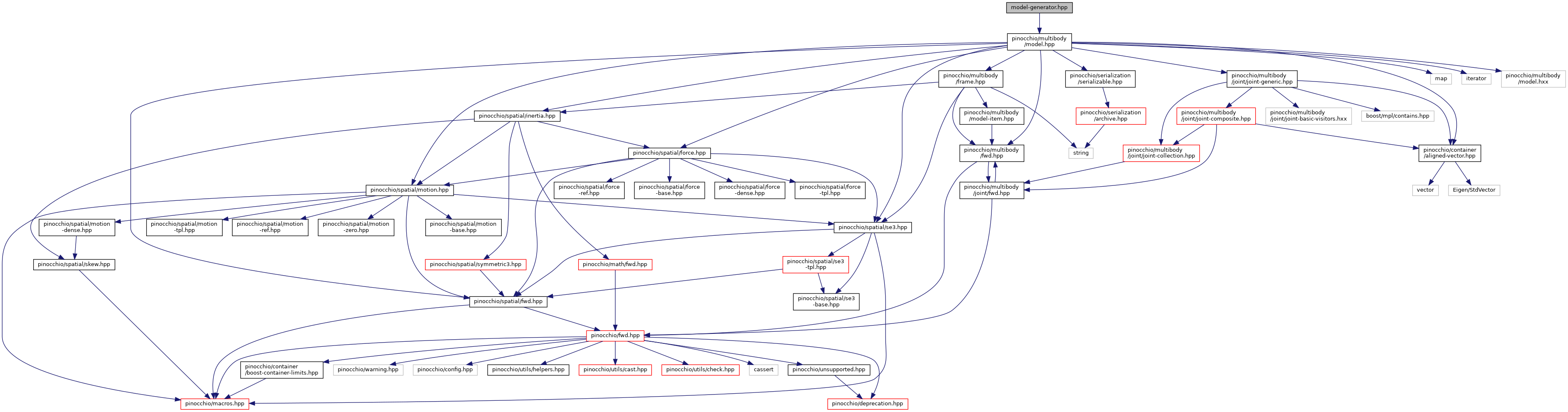
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pinocchio::MimicTestCases |
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename D > | |
| void | pinocchio::addJointAndBody (Model &model, const JointModelBase< D > &jmodel, const Model::JointIndex parent_id, const SE3 &joint_placement, const std::string &name, const Inertia &Y) |
| void | pinocchio::buildAllJointsModel (Model &model) |
| void | pinocchio::mimicTransformMatrix (const Model &model_full, const Model &model_mimic, const std::vector< pinocchio::JointIndex > &, const std::vector< pinocchio::JointIndex > &mimicking_ids, const std::vector< double > &ratios, Eigen::MatrixXd &G) |
| void | pinocchio::toFull (const Model &model_full, const Model &model_mimic, const std::vector< pinocchio::JointIndex > &mimicking_ids, const std::vector< double > &ratio, const std::vector< double > &offset, const Eigen::VectorXd &q, Eigen::VectorXd &q_full) |