#include "pinocchio/math/quaternion.hpp"#include "pinocchio/spatial/explog.hpp"#include "pinocchio/utils/static-if.hpp"
Include dependency graph for explog-quaternion.hpp:
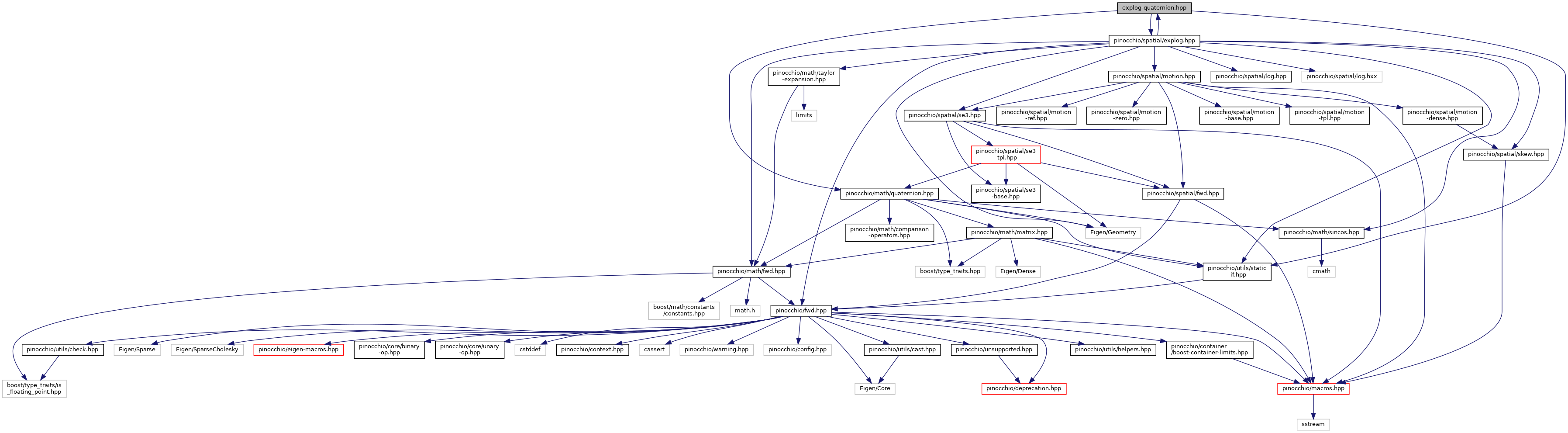
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::quaternion | |
| Quaternion operations. | |
Functions | |
| template<typename Vector3Like > | |
| Eigen::Quaternion< typename Vector3Like::Scalar, PINOCCHIO_EIGEN_PLAIN_TYPE(Vector3Like)::Options > | pinocchio::quaternion::exp3 (const Eigen::MatrixBase< Vector3Like > &v) |
| Exp: so3 -> SO3 (quaternion) More... | |
| template<typename Vector3Like , typename QuaternionLike > | |
| void | pinocchio::quaternion::exp3 (const Eigen::MatrixBase< Vector3Like > &v, Eigen::QuaternionBase< QuaternionLike > &quat_out) |
| Exp: so3 -> SO3 (quaternion) More... | |
| template<typename Vector6Like > | |
| Eigen::Matrix< typename Vector6Like::Scalar, 7, 1, PINOCCHIO_EIGEN_PLAIN_TYPE(Vector6Like)::Options > | pinocchio::quaternion::exp6 (const Eigen::MatrixBase< Vector6Like > &vec6) |
| The se3 -> SE3 exponential map, using quaternions to represent the output rotation. More... | |
| template<typename Vector6Like , typename Config_t > | |
| void | pinocchio::quaternion::exp6 (const Eigen::MatrixBase< Vector6Like > &vec6, Eigen::MatrixBase< Config_t > &qout) |
| The se3 -> SE3 exponential map, using quaternions to represent the output rotation. More... | |
| template<typename MotionDerived > | |
| Eigen::Matrix< typename MotionDerived::Scalar, 7, 1, PINOCCHIO_EIGEN_PLAIN_TYPE(typename MotionDerived::Vector3)::Options > | pinocchio::quaternion::exp6 (const MotionDense< MotionDerived > &motion) |
| The se3 -> SE3 exponential map, using quaternions to represent the output rotation. More... | |
| template<typename MotionDerived , typename Config_t > | |
| void | pinocchio::quaternion::exp6 (const MotionDense< MotionDerived > &motion, Eigen::MatrixBase< Config_t > &qout) |
| The se3 -> SE3 exponential map, using quaternions to represent the output rotation. More... | |
| template<typename Vector3Like , typename Matrix43Like > | |
| void | pinocchio::quaternion::Jexp3CoeffWise (const Eigen::MatrixBase< Vector3Like > &v, const Eigen::MatrixBase< Matrix43Like > &Jexp) |
Derivative of  where where  is a small perturbation of is a small perturbation of  at identity. More... at identity. More... | |
| template<typename QuaternionLike , typename Matrix3Like > | |
| void | pinocchio::quaternion::Jlog3 (const Eigen::QuaternionBase< QuaternionLike > &quat, const Eigen::MatrixBase< Matrix3Like > &Jlog) |
| Computes the Jacobian of log3 operator for a unit quaternion. More... | |
| template<typename QuaternionLike > | |
| Eigen::Matrix< typename QuaternionLike::Scalar, 3, 1, PINOCCHIO_EIGEN_PLAIN_TYPE(typename QuaternionLike::Vector3)::Options > | pinocchio::quaternion::log3 (const Eigen::QuaternionBase< QuaternionLike > &quat) |
| Log: SO3 -> so3. More... | |
| template<typename QuaternionLike > | |
| Eigen::Matrix< typename QuaternionLike::Scalar, 3, 1, PINOCCHIO_EIGEN_PLAIN_TYPE(typename QuaternionLike::Vector3)::Options > | pinocchio::quaternion::log3 (const Eigen::QuaternionBase< QuaternionLike > &quat, typename QuaternionLike::Scalar &theta) |
| Same as log3 but with a unit quaternion as input. More... | |