#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/algorithm/kinematics.hpp"#include "pinocchio/algorithm/centroidal.hxx"
Include dependency graph for centroidal.hpp:
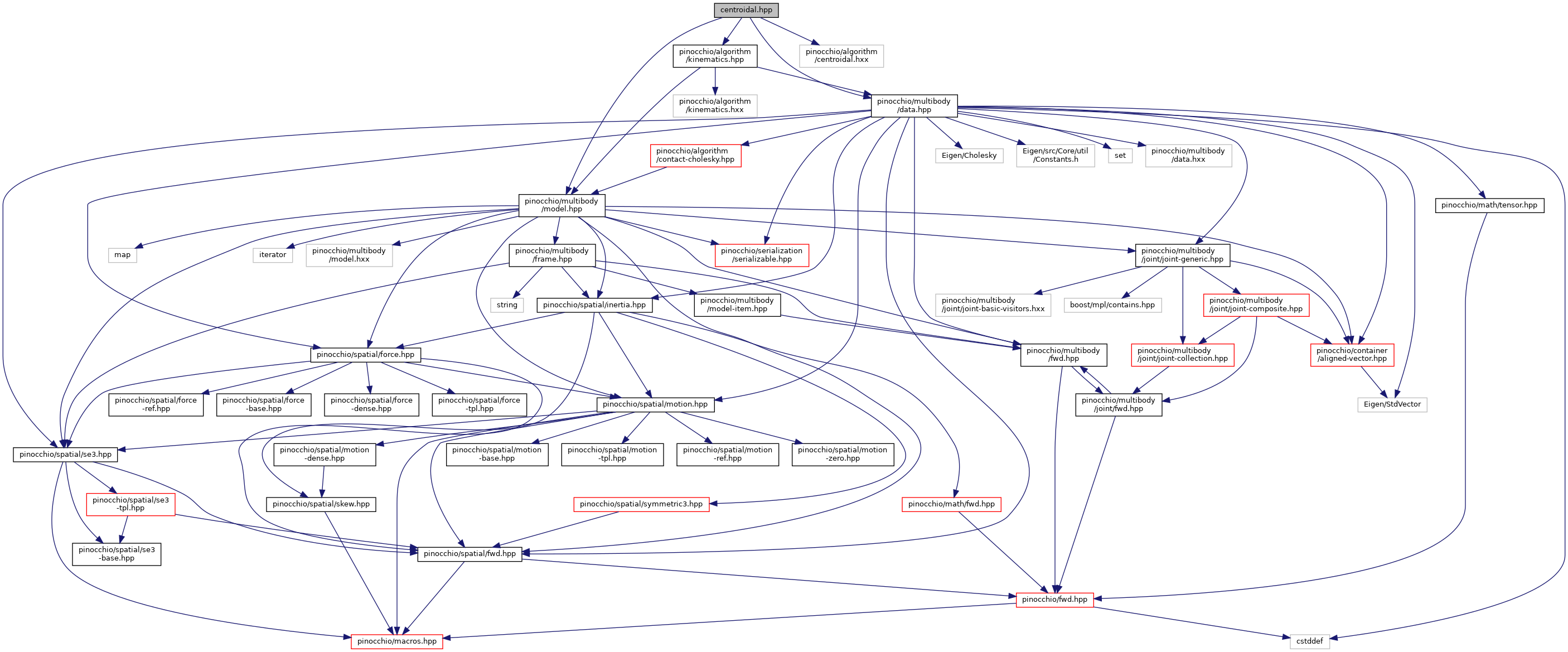
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::ccrba (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
| Computes the Centroidal Momentum Matrix, the Composite Ridig Body Inertia as well as the centroidal momenta according to the current joint configuration and velocity. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::computeCentroidalMap (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q) |
| Computes the Centroidal Momentum Matrix. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::computeCentroidalMapTimeVariation (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
| Computes the Centroidal Momentum Matrix time derivative. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Force & | pinocchio::computeCentroidalMomentum (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data) |
| Computes the Centroidal momentum, a.k.a. the total momenta of the system expressed around the center of mass. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Force & | pinocchio::computeCentroidalMomentum (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
| Computes the Centroidal momentum, a.k.a. the total momenta of the system expressed around the center of mass. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Force & | pinocchio::computeCentroidalMomentumTimeVariation (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data) |
| Computes the Centroidal momemtum and its time derivatives, a.k.a. the total momenta of the system and its time derivative expressed around the center of mass. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType1 , typename TangentVectorType2 > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Force & | pinocchio::computeCentroidalMomentumTimeVariation (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType1 > &v, const Eigen::MatrixBase< TangentVectorType2 > &a) |
| Computes the Centroidal momemtum and its time derivatives, a.k.a. the total momenta of the system and its time derivative expressed around the center of mass. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::Matrix6x & | pinocchio::dccrba (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
| Computes the time derivative of the Centroidal Momentum Matrix according to the current configuration and velocity vectors. More... | |