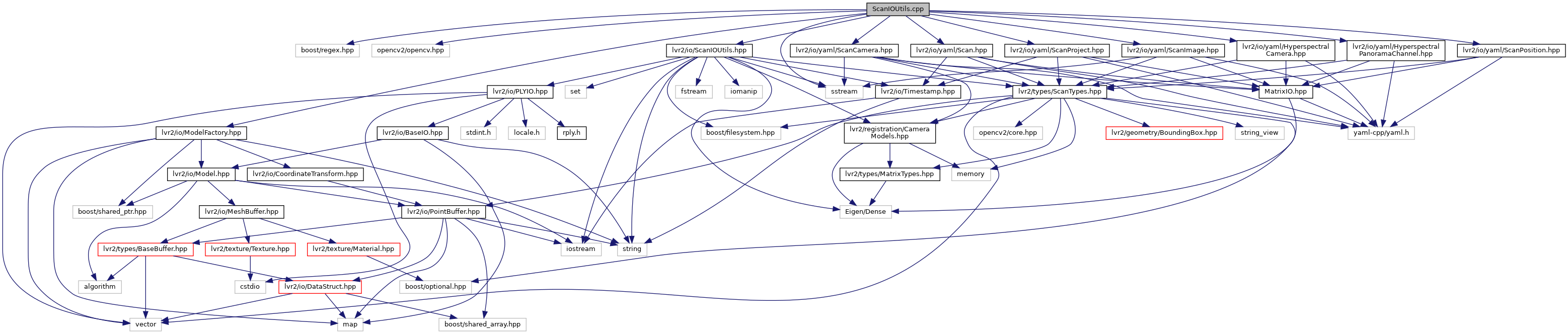
#include <boost/regex.hpp>#include <opencv2/opencv.hpp>#include "lvr2/io/ModelFactory.hpp"#include "lvr2/io/ScanIOUtils.hpp"#include "lvr2/io/yaml/Scan.hpp"#include "lvr2/io/yaml/ScanCamera.hpp"#include "lvr2/io/yaml/HyperspectralCamera.hpp"#include "lvr2/io/yaml/HyperspectralPanoramaChannel.hpp"#include "lvr2/io/yaml/ScanImage.hpp"#include "lvr2/io/yaml/ScanPosition.hpp"#include "lvr2/io/yaml/ScanProject.hpp"#include <sstream>
Include dependency graph for ScanIOUtils.cpp:
Go to the source code of this file.
Namespaces | |
| lvr2 | |
Functions | |
| boost::filesystem::path | lvr2::getHyperspectralCameraDirectory (boost::filesystem::path root, const std::string positionDirectory, const std::string cameraDirectory) |
| HYPERSPECTRAL_CAMERA. More... | |
| boost::filesystem::path | lvr2::getPanoramaChannelDirectory (boost::filesystem::path root, const std::string positionDirectory, const std::string panoramaDirectory) |
| HYPERSPECTRAL_PANORAMA_CHANNEL. More... | |
| boost::filesystem::path | lvr2::getScanCameraDirectory (boost::filesystem::path root, const std::string positionDirectory, const std::string cameraDirectory) |
| SCANCAMERA. More... | |
| boost::filesystem::path | lvr2::getScanImageDirectory (boost::filesystem::path root, const std::string positionDirectory, const std::string cameraDirectory) |
| std::string | lvr2::getSensorType (const boost::filesystem::path &dir) |
| Gets the sensor type for a given directory. Return an empty string if the directory does not contain a meta.yaml file with 'sensor_type' element. More... | |
| bool | lvr2::loadHyperspectralCamera (const boost::filesystem::path &root, HyperspectralCamera &camera, const size_t &positionNumber) |
| bool | lvr2::loadHyperspectralCamera (const boost::filesystem::path &root, HyperspectralCamera &camera, const std::string &positionDirectory) |
| bool | lvr2::loadHyperspectralCamera (const boost::filesystem::path &root, HyperspectralCamera &camera, const std::string &positionDirectory, const std::string &cameraDirectory) |
| void | lvr2::loadHyperspectralPanoramaChannels (std::vector< HyperspectralPanoramaChannelPtr > &channels, boost::filesystem::path dataPath) |
| bool | lvr2::loadScan (const boost::filesystem::path &root, Scan &scan, const size_t &positionNumber, const size_t &scanNumber) |
| bool | lvr2::loadScan (const boost::filesystem::path &root, Scan &scan, const std::string &positionDirectory, const size_t &scanNumber) |
| bool | lvr2::loadScan (const boost::filesystem::path &root, Scan &scan, const std::string &positionDirectory, const std::string &scanDirectory, const std::string &scanName) |
| bool | lvr2::loadScanCamera (const boost::filesystem::path &root, ScanCamera &image, const size_t &positionNumber, const size_t &cameraNumber) |
| bool | lvr2::loadScanCamera (const boost::filesystem::path &root, ScanCamera &image, const std::string &positionDirectory, const size_t &cameraNumber) |
| bool | lvr2::loadScanCamera (const boost::filesystem::path &root, ScanCamera &image, const std::string &positionDirectory, const std::string &cameraDirectory) |
| bool | lvr2::loadScanImage (const boost::filesystem::path &root, ScanImage &image, const size_t &positionNumber, const size_t &cameraNumber, const size_t &imageNumber) |
| bool | lvr2::loadScanImage (const boost::filesystem::path &root, ScanImage &image, const std::string &positionDirectory, const size_t &cameraNumber, const size_t &imageNumber) |
| bool | lvr2::loadScanImage (const boost::filesystem::path &root, ScanImage &image, const std::string &positionDirectory, const std::string &cameraDirectory, const size_t &imageNumber) |
| void | lvr2::loadScanImages (std::vector< ScanImagePtr > &images, boost::filesystem::path dataPath) |
| bool | lvr2::loadScanPosition (const boost::filesystem::path &root, ScanPosition &scanPos, const size_t &positionNumber) |
| bool | lvr2::loadScanPosition (const boost::filesystem::path &root, ScanPosition &scanPos, const std::string &positionDirectory) |
| bool | lvr2::loadScanProject (const boost::filesystem::path &root, ScanProject &scanProj) |
| void | lvr2::saveHyperspectralCamera (const boost::filesystem::path &root, const HyperspectralCamera &camera, const size_t &positionNumber) |
| void | lvr2::saveHyperspectralCamera (const boost::filesystem::path &root, const HyperspectralCamera &camera, const std::string &positionDirectory) |
| void | lvr2::saveHyperspectralCamera (const boost::filesystem::path &root, const HyperspectralCamera &camera, const std::string positionDirectory, const std::string &cameraDirectory) |
| void | lvr2::saveHyperspectralPanoramaChannel (const boost::filesystem::path &root, const HyperspectralPanoramaChannel &channel, const std::string positionDirectory, const std::string panoramaDirectory, const size_t &channelNumber) |
| void | lvr2::saveScan (const boost::filesystem::path &root, const Scan &scan, const size_t &positionNumber, const size_t &scanNumber) |
| void | lvr2::saveScan (const boost::filesystem::path &root, const Scan &scan, const std::string positionDirectory, const std::string scanDirectory, const size_t &scanNumber) |
| void | lvr2::saveScan (const boost::filesystem::path &root, const Scan &scan, const std::string positionName, const std::string scanDirectoryName, const std::string scanName) |
| SCAN. More... | |
| void | lvr2::saveScanCamera (const boost::filesystem::path &root, const ScanCamera &image, const size_t &positionNumber, const size_t &cameraNumber) |
| void | lvr2::saveScanCamera (const boost::filesystem::path &root, const ScanCamera &image, const std::string &positionDirectory, const size_t &cameraNumber) |
| void | lvr2::saveScanCamera (const boost::filesystem::path &root, const ScanCamera &image, const std::string positionDirectory, const std::string cameraDirectory) |
| SCANCAMERA. More... | |
| void | lvr2::saveScanImage (const boost::filesystem::path &root, const ScanImage &image, const size_t &positionNumber, const size_t &cameraNumber, const size_t &imageNumber) |
| SCANIMAGE. More... | |
| void | lvr2::saveScanImage (const boost::filesystem::path &root, const ScanImage &image, const std::string positionDirectory, const size_t &cameraNumber, const size_t &imageNumber) |
| void | lvr2::saveScanImage (const boost::filesystem::path &root, const ScanImage &image, const std::string positionDirectory, const std::string cameraDirectory, const size_t &imageNr) |
| void | lvr2::saveScanPosition (const boost::filesystem::path &root, const ScanPosition &scanPos, const size_t &positionNumber) |
| void | lvr2::saveScanPosition (const boost::filesystem::path &root, const ScanPosition &scanPos, const std::string positionDirectory) |
| SCAN_POSITION. More... | |
| void | lvr2::saveScanProject (const boost::filesystem::path &root, const ScanProject &scanProj) |
| SCAN_PROJECT. More... | |