Rotation, common code between Rotation matrix and Quaternion. More...
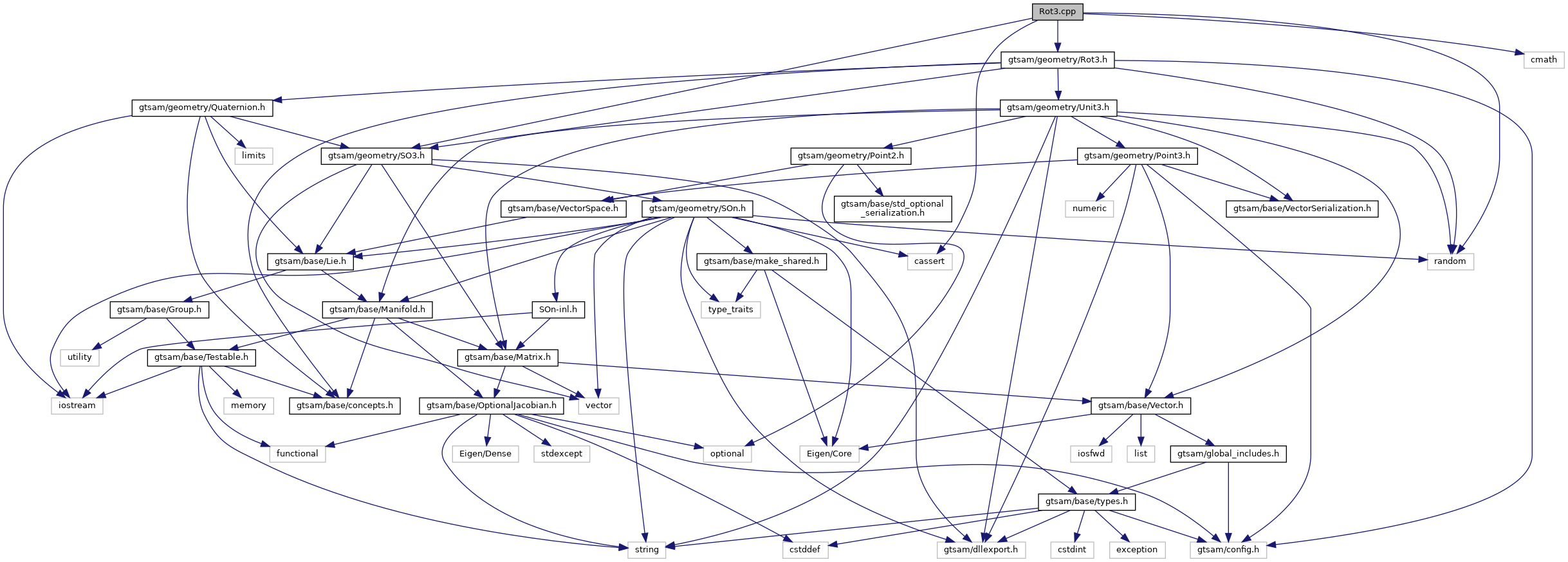
#include <gtsam/geometry/Rot3.h>#include <gtsam/geometry/SO3.h>#include <cmath>#include <cassert>#include <random>
Include dependency graph for Rot3.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| ostream & | gtsam::operator<< (ostream &os, const Rot3 &R) |
| pair< Matrix3, Vector3 > | gtsam::RQ (const Matrix3 &A, OptionalJacobian< 3, 9 > H) |
Detailed Description
Rotation, common code between Rotation matrix and Quaternion.
Definition in file Rot3.cpp.