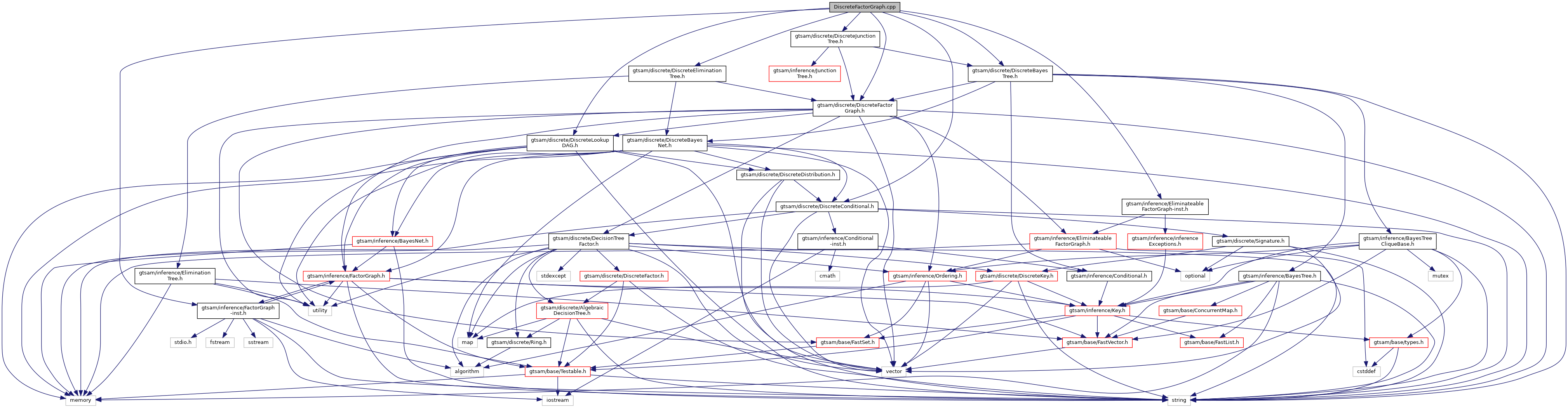
#include <gtsam/discrete/DiscreteBayesTree.h>#include <gtsam/discrete/DiscreteConditional.h>#include <gtsam/discrete/DiscreteEliminationTree.h>#include <gtsam/discrete/DiscreteFactorGraph.h>#include <gtsam/discrete/DiscreteJunctionTree.h>#include <gtsam/discrete/DiscreteLookupDAG.h>#include <gtsam/inference/EliminateableFactorGraph-inst.h>#include <gtsam/inference/FactorGraph-inst.h>
Include dependency graph for DiscreteFactorGraph.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| std::pair< DiscreteConditional::shared_ptr, DiscreteFactor::shared_ptr > | gtsam::EliminateDiscrete (const DiscreteFactorGraph &factors, const Ordering &frontalKeys) |
| Main elimination function for DiscreteFactorGraph. More... | |
| std::pair< DiscreteConditional::shared_ptr, DiscreteFactor::shared_ptr > | gtsam::EliminateForMPE (const DiscreteFactorGraph &factors, const Ordering &frontalKeys) |
| Alternate elimination function for that creates non-normalized lookup tables. More... | |
Detailed Description
- Date
- Feb 14, 2011
Definition in file DiscreteFactorGraph.cpp.