Setter functions for the ETSI ITS CPM (TS) More...
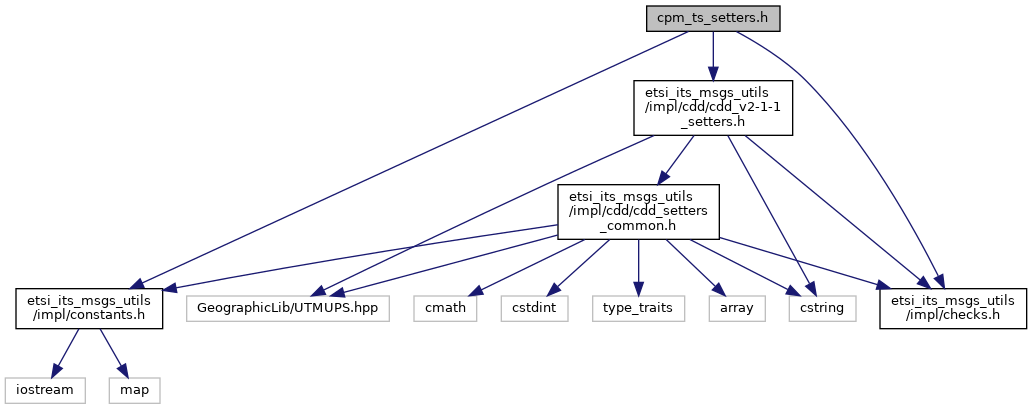
#include <etsi_its_msgs_utils/impl/checks.h>#include <etsi_its_msgs_utils/impl/constants.h>#include <etsi_its_msgs_utils/impl/cdd/cdd_v2-1-1_setters.h>
Include dependency graph for cpm_ts_setters.h:
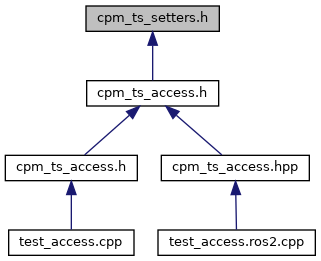
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| etsi_its_cpm_ts_msgs | |
| etsi_its_cpm_ts_msgs::access | |
Functions | |
| void | etsi_its_cpm_ts_msgs::access::addContainerToCPM (CollectivePerceptionMessage &cpm, const WrappedCpmContainer &container) |
| Adds a container to the Collective Perception Message (CPM). More... | |
| void | etsi_its_cpm_ts_msgs::access::addPerceivedObjectToContainer (WrappedCpmContainer &container, const PerceivedObject &perceived_object) |
| Adds a PerceivedObject to the PerceivedObjectContainer / WrappedCpmContainer. More... | |
| void | etsi_its_cpm_ts_msgs::access::addSensorInformationContainerToCPM (CollectivePerceptionMessage &cpm, const WrappedCpmContainer &container) |
| Adds a container to the Collective Perception Message (CPM). More... | |
| void | etsi_its_cpm_ts_msgs::access::addSensorInformationToContainer (WrappedCpmContainer &container, const SensorInformation &sensor_information) |
| Adds a SensorInformation to the SensorInformationContainer / WrappedCpmContainer. More... | |
| void | etsi_its_cpm_ts_msgs::access::initPerceivedObject (PerceivedObject &object, const gm::Point &point, const int16_t delta_time=0) |
| Initializes a PerceivedObject with the given point and delta time. More... | |
| void | etsi_its_cpm_ts_msgs::access::initPerceivedObjectContainer (WrappedCpmContainer &container, const uint8_t n_objects=0) |
| Initializes a WrappedCpmContainer as a PerceivedObjectContainer with the given number of objects. More... | |
| void | etsi_its_cpm_ts_msgs::access::initPerceivedObjectWithUTMPosition (CollectivePerceptionMessage &cpm, PerceivedObject &object, const gm::PointStamped &point, const int16_t delta_time=0) |
| Initializes a PerceivedObject with the given point (utm-position) and delta time. More... | |
| void | etsi_its_cpm_ts_msgs::access::initSensorInformationContainer (WrappedCpmContainer &container) |
| Initializes a WrappedCpmContainer as a SensorInformationContainer. More... | |
| void | etsi_its_cpm_ts_msgs::access::setAccelerationComponent (AccelerationComponent &acceleration, const double value, const double confidence=std::numeric_limits< double >::infinity()) |
| Sets the value and confidence of a AccelerationComponent. More... | |
| void | etsi_its_cpm_ts_msgs::access::setAccelerationOfPerceivedObject (PerceivedObject &object, const gm::Vector3 &cartesian_acceleration, const double x_std=std::numeric_limits< double >::infinity(), const double y_std=std::numeric_limits< double >::infinity(), const double z_std=std::numeric_limits< double >::infinity()) |
| Sets the acceleration of a perceived object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setCartesianCoordinateWithConfidence (CartesianCoordinateWithConfidence &coordinate, const double value, const double confidence=std::numeric_limits< double >::infinity()) |
| Sets the value and confidence of a CartesianCoordinateWithConfidence object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setDimensionsOfPerceivedObject (PerceivedObject &object, const gm::Vector3 &dimensions, const double x_std=std::numeric_limits< double >::infinity(), const double y_std=std::numeric_limits< double >::infinity(), const double z_std=std::numeric_limits< double >::infinity()) |
| Sets all dimensions of a perceived object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setFromUTMPosition (CollectivePerceptionMessage &cpm, const gm::PointStamped &utm_position, const int &zone, const bool &northp) |
| Set the ReferencePosition of a CPM from a given UTM-Position. More... | |
| void | etsi_its_cpm_ts_msgs::access::setIdOfPerceivedObject (PerceivedObject &object, const uint16_t id) |
| Set the ID of a PerceivedObject. More... | |
| void | etsi_its_cpm_ts_msgs::access::setItsPduHeader (CollectivePerceptionMessage &cpm, const uint32_t station_id, const uint8_t protocol_version=0) |
| Sets the ITS PDU header of a CPM. More... | |
| void | etsi_its_cpm_ts_msgs::access::setMeasurementDeltaTimeOfPerceivedObject (PerceivedObject &object, const int16_t delta_time=0) |
| Sets the measurement delta time of a PerceivedObject. More... | |
| void | etsi_its_cpm_ts_msgs::access::setObjectDimension (ObjectDimension &dimension, const double value, const double confidence=std::numeric_limits< double >::infinity()) |
| Sets the object dimension with the given value and confidence. More... | |
| void | etsi_its_cpm_ts_msgs::access::setPositionOfPerceivedObject (PerceivedObject &object, const gm::Point &point, const double x_std=std::numeric_limits< double >::infinity(), const double y_std=std::numeric_limits< double >::infinity(), const double z_std=std::numeric_limits< double >::infinity()) |
| Sets the position of a perceived object (relative to the CPM's reference position). More... | |
| void | etsi_its_cpm_ts_msgs::access::setReferencePosition (CollectivePerceptionMessage &cpm, const double latitude, const double longitude, const double altitude=AltitudeValue::UNAVAILABLE) |
| Set the ReferencePositionWithConfidence for a CPM TS. More... | |
| void | etsi_its_cpm_ts_msgs::access::setReferenceTime (CollectivePerceptionMessage &cpm, const uint64_t unix_nanosecs, const uint16_t n_leap_seconds=etsi_its_msgs::LEAP_SECOND_INSERTIONS_SINCE_2004.rbegin() ->second) |
| Sets the reference time in a CPM. More... | |
| void | etsi_its_cpm_ts_msgs::access::setSensorID (SensorInformation &sensor_information, const uint8_t sensor_id=0) |
| Sets the sensorId of a SensorInformation object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setSensorType (SensorInformation &sensor_information, const uint8_t sensor_type=SensorType::UNDEFINED) |
| Sets the sensorType of a SensorInformation object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setUTMPositionOfPerceivedObject (CollectivePerceptionMessage &cpm, PerceivedObject &object, const gm::PointStamped &utm_position, const double x_std=std::numeric_limits< double >::infinity(), const double y_std=std::numeric_limits< double >::infinity(), const double z_std=std::numeric_limits< double >::infinity()) |
| Sets the position of a perceived object based on a UTM position. More... | |
| void | etsi_its_cpm_ts_msgs::access::setVelocityComponent (VelocityComponent &velocity, const double value, const double confidence=std::numeric_limits< double >::infinity()) |
| Sets the value and confidence of a VelocityComponent. More... | |
| void | etsi_its_cpm_ts_msgs::access::setVelocityOfPerceivedObject (PerceivedObject &object, const gm::Vector3 &cartesian_velocity, const double x_std=std::numeric_limits< double >::infinity(), const double y_std=std::numeric_limits< double >::infinity(), const double z_std=std::numeric_limits< double >::infinity()) |
| void | etsi_its_cpm_ts_msgs::access::setWGSRefPosConfidence (CollectivePerceptionMessage &cpm, const std::array< double, 4 > &covariance_matrix) |
| Set the confidence of the reference position. More... | |
| void | etsi_its_cpm_ts_msgs::access::setXDimensionOfPerceivedObject (PerceivedObject &object, const double value, const double std=std::numeric_limits< double >::infinity()) |
| Sets the x-dimension of a perceived object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setYawOfPerceivedObject (PerceivedObject &object, const double yaw, double yaw_std=std::numeric_limits< double >::infinity()) |
| Sets the yaw angle of a perceived object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setYawRateOfPerceivedObject (PerceivedObject &object, const double yaw_rate, double yaw_rate_std=std::numeric_limits< double >::infinity()) |
| Sets the yaw rate of a perceived object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setYDimensionOfPerceivedObject (PerceivedObject &object, const double value, const double std=std::numeric_limits< double >::infinity()) |
| Sets the y-dimension of a perceived object. More... | |
| void | etsi_its_cpm_ts_msgs::access::setZDimensionOfPerceivedObject (PerceivedObject &object, const double value, const double std=std::numeric_limits< double >::infinity()) |
| Sets the z-dimension of a perceived object. More... | |
Detailed Description
Setter functions for the ETSI ITS CPM (TS)
Definition in file cpm_ts_setters.h.