#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/algorithm/geometry.hpp"#include "pinocchio/extra/config.hpp"#include <Eigen/Core>#include "pinocchio/extra/reachable-workspace.hxx"
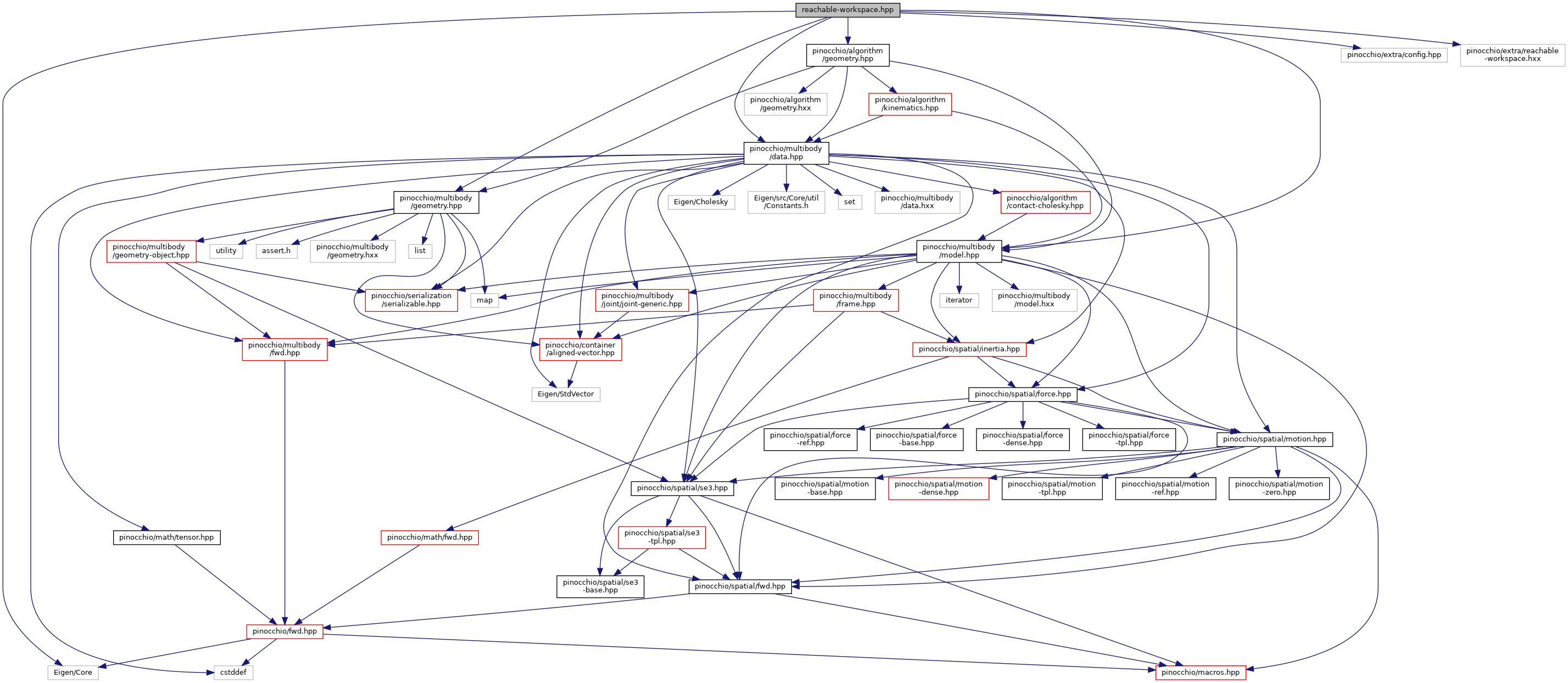
Include dependency graph for reachable-workspace.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pinocchio::ReachableSetParams |
| Parameters for the reachable space algorithm. More... | |
| struct | pinocchio::ReachableSetResults |
| Structure containing the return value for the reachable algorithm. More... | |
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::internal | |
Functions | |
| PINOCCHIO_EXTRA_DLLAPI void | pinocchio::internal::buildConvexHull (ReachableSetResults &res) |
| Computes the convex hull using qhull associated with the vertex stored in res. More... | |
| void | pinocchio::internal::computeJointVel (const Eigen::VectorXd &res1, const Eigen::VectorXd &res2, const Eigen::VectorXi &comb, Eigen::VectorXd &qv) |
| Computes the joint configuration associated with the permutation results stored in res1 and res2. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , class FilterFunction > | |
| void | pinocchio::internal::computeVertex (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const Eigen::MatrixBase< ConfigVectorType > &q0, const double time_horizon, const int frame_id, FilterFunction config_filter, Eigen::MatrixXd &vertex, const ReachableSetParams ¶ms=ReachableSetParams()) |
| Samples points to create the reachable workspace that will respect mechanical limits of the model as well as the time horizon. More... | |
| void | pinocchio::internal::generateCombination (const int n, const int k, Eigen::VectorXi &indices) |
| Return a subsequence of length k of elements from range 0 to n. Inspired by https://docs.python.org/3/library/itertools.html#itertools.combinations. Indices table will hold the results. More... | |
| void | pinocchio::internal::productCombination (const Eigen::VectorXd &element, const int repeat, Eigen::VectorXi &indices, Eigen::VectorXd &combination) |
| Cartesian product of input element with itself. Number of repetition is specified with repeat argument. Inspired by https://docs.python.org/3/library/itertools.html#itertools.product. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| void | pinocchio::reachableWorkspace (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const Eigen::MatrixBase< ConfigVectorType > &q0, const double time_horizon, const int frame_id, Eigen::MatrixXd &vertex, const ReachableSetParams ¶ms=ReachableSetParams()) |
| Computes the reachable workspace on a fixed time horizon. For more information, please see https://gitlab.inria.fr/auctus-team/people/antunskuric/pycapacity. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| void | pinocchio::reachableWorkspaceHull (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const Eigen::MatrixBase< ConfigVectorType > &q0, const double time_horizon, const int frame_id, ReachableSetResults &res, const ReachableSetParams ¶ms=ReachableSetParams()) |
| Computes the convex Hull reachable workspace on a fixed time horizon. For more information, please see https://gitlab.inria.fr/auctus-team/people/antunskuric/pycapacity. More... | |