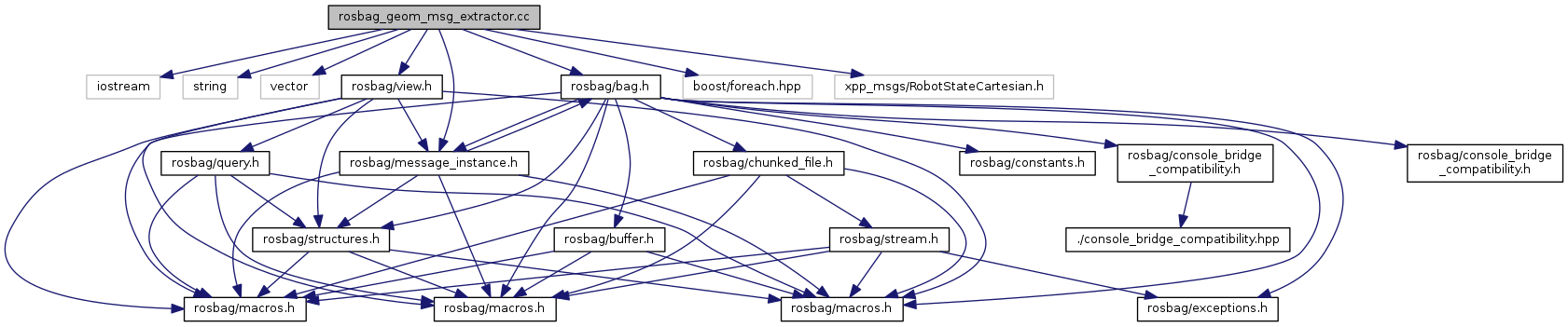
#include <iostream>#include <string>#include <vector>#include <rosbag/bag.h>#include <rosbag/view.h>#include <rosbag/message_instance.h>#include <boost/foreach.hpp>#include <xpp_msgs/RobotStateCartesian.h>
Include dependency graph for rosbag_geom_msg_extractor.cc:
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Extracts the standard ROS geometry_msgs/Vector3.h from a ROS bag of RobotStateCartesian and writes them to a new bag. The bags with standard messages can then easily be imported and plotted in matlab.
See towr/matlab/plot_rosbag.m for an example of how to open these.
Definition at line 48 of file rosbag_geom_msg_extractor.cc.