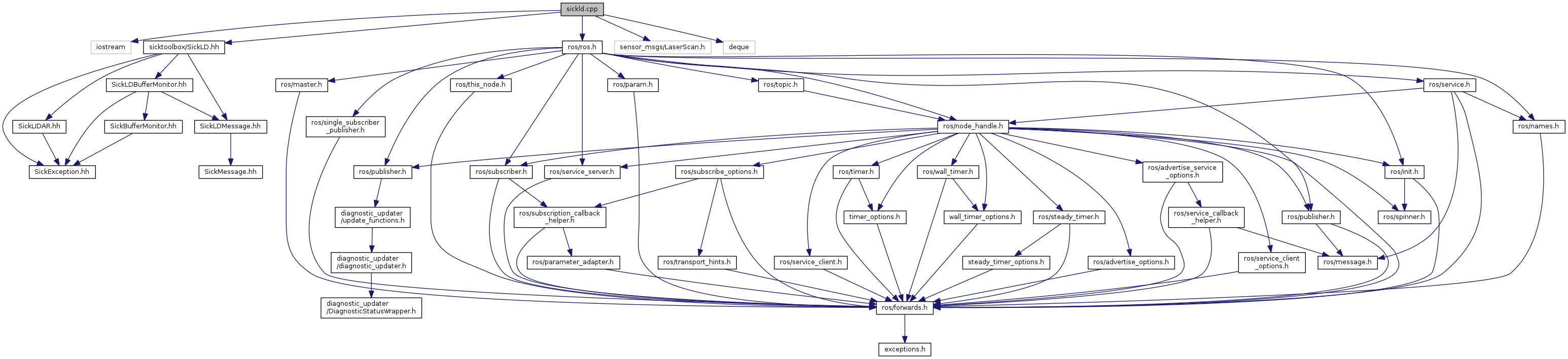
#include <iostream>
#include <sicktoolbox/SickLD.hh>
#include "ros/ros.h"
#include "sensor_msgs/LaserScan.h"
#include <deque>
Go to the source code of this file.
|
| int | main (int argc, char *argv[]) |
| |
| void | publish_scan (ros::Publisher *pub, double *range_values, uint32_t n_range_values, unsigned int *intensity_values, uint32_t n_intensity_values, ros::Time start, double scan_time, bool inverted, float angle_min, float angle_max, std::string frame_id) |
| |
| #define DEG2RAD |
( |
|
x | ) |
((x)*M_PI/180.) |
| int main |
( |
int |
argc, |
|
|
char * |
argv[] |
|
) |
| |
| void publish_scan |
( |
ros::Publisher * |
pub, |
|
|
double * |
range_values, |
|
|
uint32_t |
n_range_values, |
|
|
unsigned int * |
intensity_values, |
|
|
uint32_t |
n_intensity_values, |
|
|
ros::Time |
start, |
|
|
double |
scan_time, |
|
|
bool |
inverted, |
|
|
float |
angle_min, |
|
|
float |
angle_max, |
|
|
std::string |
frame_id |
|
) |
| |