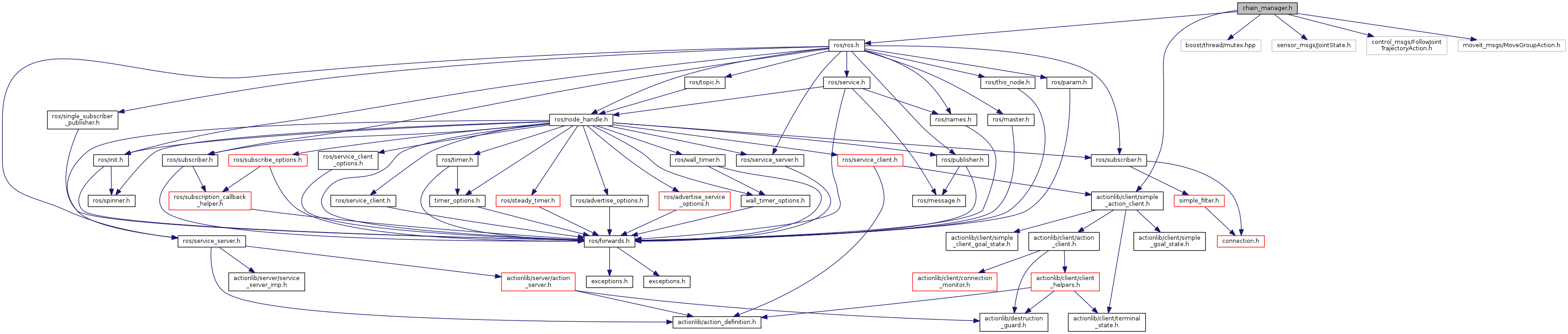
#include <ros/ros.h>#include <boost/thread/mutex.hpp>#include <sensor_msgs/JointState.h>#include <actionlib/client/simple_action_client.h>#include <control_msgs/FollowJointTrajectoryAction.h>#include <moveit_msgs/MoveGroupAction.h>
Include dependency graph for chain_manager.h:
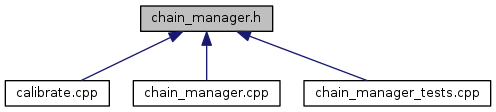
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | robot_calibration::ChainManager::ChainController |
| class | robot_calibration::ChainManager |
| Manages moving joints to a new pose, determining when they are settled, and returning current joint_states. More... | |
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |