The prbt_hardware_support package contains files supporting the certification of a robot system including the PRBT manipulator according to DIN EN ISO 10218-1. As safety controllers the Pilz hardware PNOZmulti and PSS4000 are supported. A Modbus connection is used for the communication between ROS <-> safety controller.
There is no need to call these launch files directly; they are included from prbt_support/launch/robot.launch.
How-to activate and deactivate hardware features
The following table shows the names and the possible argument values of the features supported by our hardware. The features can be configured via arguments of prbt_support/launch/robot.launch.
| Parameter Description | Argument name in robot.launch | Possible values in robot.launch |
|---|---|---|
| Gripper Model | gripper | *<arg unset>*, pg70 |
| Safety Controller Hardware | safety_hw | *pss4000*, pnoz |
| Brake Test Support | has_braketest_support | *true*, false |
| Operation Mode Support | has_operation_mode_support | *true*, false |
| Visual Status Indicator | visual_status_indicator | *true*, false |
With pg70 referring to Schunk PG plus 70. For more on gripper models see prbt_grippers.
Currently, we only support the following configurations depending on the safety controller. If the safety controller is changed, please ensure that the arguments are set as shown in the table.
| Argument name | Default value with PSS400 | Default value with PNOZmulti |
|---|---|---|
safety_hw | pss4000 | pnoz |
has_braketest_support | true | false |
has_operation_mode_support | true | true |
visual_status_indicator | true | true |
Safety Features
Safe torque off function
The Safe torque off (STO) function of the robot arm is a safety function to immediately turn off torque of the drives. The behavior triggers the RUN_PERMITTED signal.
Run permitted signal
The RUN_PERMITTED is a state required in the safety controller for the robot to operate. It is sent to the ROS system to inform it in the case of an upcoming STO of the robot.
Safe brake control
The SBC function (Safe brake control) of the robot arm is a safety function which is used in conjunction with the RUN_PERMITTED and prevents a motion when the torque of the drives is turned off.
Safe stop 1 (SS1)
To allow a controlled stop, the safety controller delays the STO function by several milliseconds. This package opens a modbus connection to the safety controller (PNOZmulti or PSS4000). The safety controller sends a RUN_PERMITTED=false signal via Modbus immediately so that ros_control has a short time interval to stop the drives via a brake ramp. The TCP could for example brake on the current trajectory. After execution of the brake ramp, the drivers are halted. Even if ROS would fail, the safety controller turns off the motors via STO (that would be a Stop 0 then).
Brake tests
Brake tests are an integral part of the SBC, since they detect malfunction of the brakes or the brake control in general. Brake tests for each drive have to be executed at a regular interval. When the safety controller requests brake tests, they have to be executed within 1 hour, else the robot cannot be moved anymore.
Operation Modes
The robot system can be controlled in various modes.
These modes are:
- T1: Speed reduced to 250 mm/s (each robot-frame), enabling switch must be pressed
- T2*: The robot moves at full speed but still the enabling switch must be pressed
- AUTOMATIC: The robot moves at full speed and follows a predefined program/process. No enabling switch is needed but safety has to be ensured by safety peripherie (fences, light curtains, ...).
See DIN EN ISO 10218-1 for more details or contact us: ros@pilz.de
Note
In operation mode T1 the robot can be moved as usual. However, if an attempt to exceed the speed limit of 250 mm/s in T1 is detected, the prevailing motion is aborted and a controlled stop is performed.
Possible error cases and their handling
| Error cases | Handling |
|---|---|
| Modbus client crashes | ROS system is shutdown which leads to an abrupt stop of the robot. |
| RUN_PERMITTED Modbus adapter crashes | ROS system is shutdown which leads to an abrupt stop of the robot. |
| Connection loss between PNOZmulti/PSS4000 & Modbus client | Stop 1 is triggered |
| System overload (messages don't arrive in time) | In case a Stop 1 message does not arrive in time, the safety controller will automatically perform a hard stop. In case a Stop 1-release message does not get through, brakes will remain closed. |
| RUN_PERMITTED Modbus adapter cannot connect to stop services | ROS system will not start. |
| RUN_PERMITTED Modbus adapter cannot connect to recover services | Node does start and robot can be moved until a stop is triggered. Afterwards the brakes will remain closed. |
Architecture
The following diagram shows all components of the system and the connections between them.
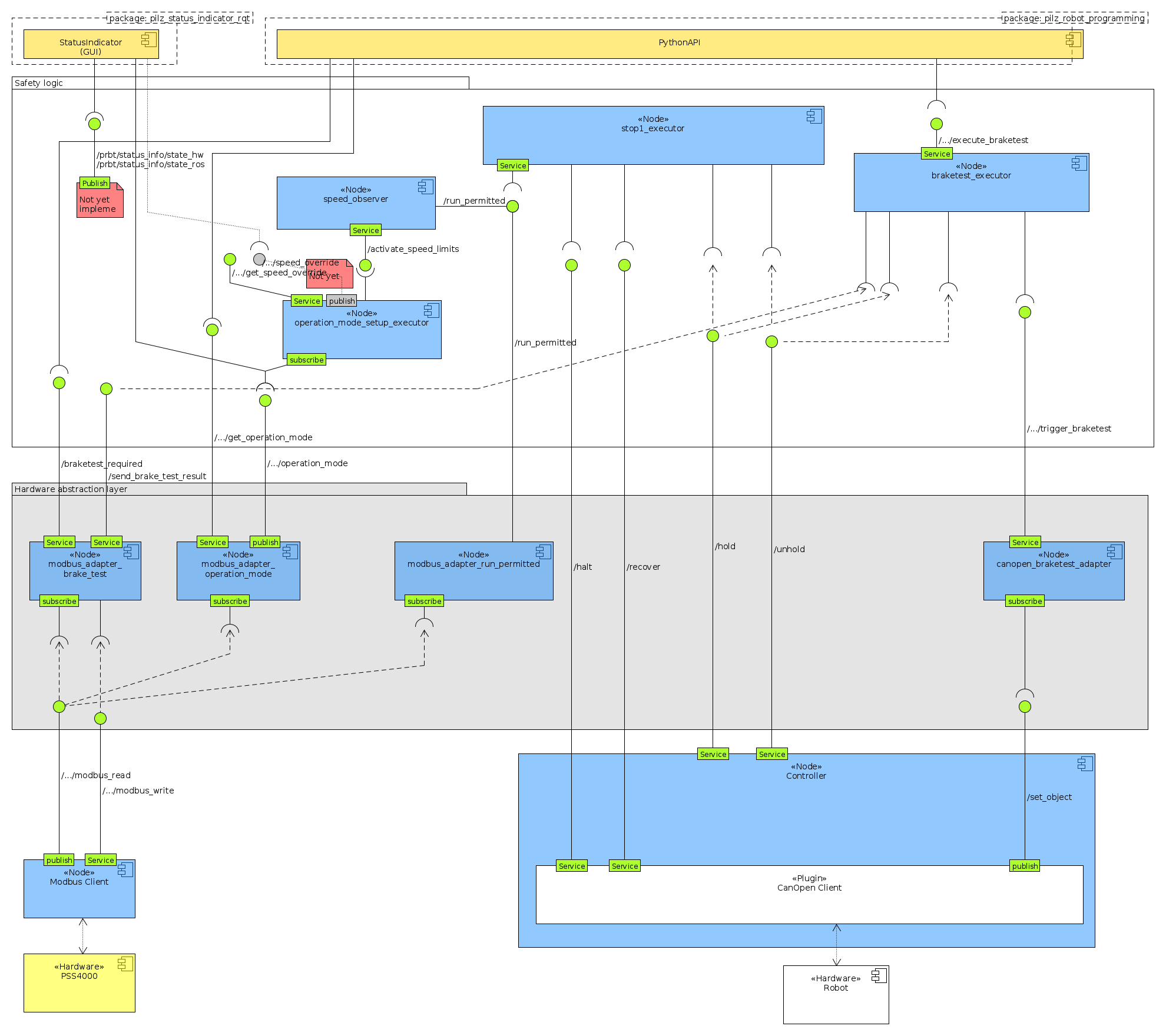
ROS API
ModbusClient
A Modbus client (for usage with the PNOZmulti or PSS4000) can be started with roslaunch prbt_hardware_support modbus_client.launch.
Published Topics
- ~/pilz_modbus_client_node/modbus_read (prbt_hardware_support/ModbusMsgInStamped)
- Holds information about the modbus holding register. Timestamp is only updated if the register content changed.
Parameters
- modbus_server_ip
- modbus_server_port
- index_of_first_register_to_read
- num_registers_to_read
- modbus_connection_retries (default: 10)
- modbus_connection_retry_timeout - timeout between retries (default: 1s)
- modbus_response_timeout (default: 20ms)
- modbus_read_topic_name (default: "/pilz_modbus_client_node/modbus_read")
- modbus_write_service_name (default: "/pilz_modbus_client_node/modbus_write")
Please note:
- The parameters
modbus_response_timeoutandmodbus_read_topic_nameare important for the Safe stop 1 functionality and must NOT be given, if thepilz_modbus_client_nodeis used as part of the Safe stop 1 functionality. If the parameters are not given the default values for these parameters are used.
ModbusAdapterRunPermittedNode
The ModbusAdapterRunPermitted is noticed via the topic /pilz_modbus_client_node/modbus_read if the RUN_PERMITTED is true or false and reacts as follows calling the corresponding services of the controllers and drivers:
- RUN_PERMITTED true: enable drives, unhold controllers
- RUN_PERMITTED false: hold controllers, disable drives
ModbusAdapterBrakeTestNode
The ModbusAdapterBrakeTestNode offers the /prbt/brake_test_required service which informs if the PSS4000 requests a brake test or if a brake test request is no longer prevailing.
BraketestExecutorNode
The BraketestExecutorNode offers the /execute_braketest service which, in interaction with the CanOpenBraketestAdapter, executes a braketest on each drive of the manipulator. This can only be done, if the robot is stopped. So, if you want to execute a braketest, ensure that the robot stands still.
ModbusAdapterOperationModeNode
The ModbusAdapterOperationModeNode publishes the active operation mode on the topic /prbt/operation_mode everytime it changes and offers the /get_operation_mode service for accessing the active operation mode.
Use rosmsg show prbt_hardware_support/OperationModes to see the definition of each value.
OperationModeSetupExecutorNode
The OperationModeSetupExecutorNode sets the speed limit for each frame based on the active operation mode and offers a service /prbt/get_speed_override. The speed override is chosen such that a speed limit violation is unlikely if all robot motions are scaled with it.
Parameters
SpeedObserverNode
The SpeedObserverNode observes the speed of the robot frames and triggers a controlled stop, if the current speed limit is exceeded.
Parameters
- frequency Hz
- additional_frames (optional): lets the user specify frames to observe in addition to the robot frames of the prevailing robot model
*Not supported yet