#include "robot_localization/filter_utilities.h"#include "robot_localization/filter_common.h"#include <Eigen/Dense>#include <ostream>#include <vector>#include <set>#include <map>#include <queue>#include <limits>#include <string>#include <boost/shared_ptr.hpp>
Include dependency graph for filter_base.h:

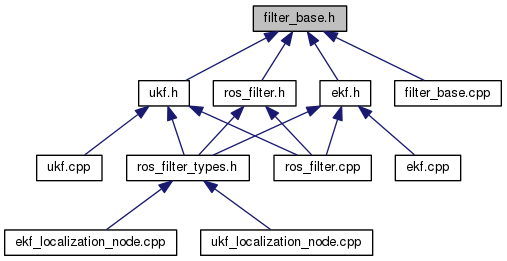
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RobotLocalization::FilterBase |
| struct | RobotLocalization::FilterState |
| Structure used for storing and comparing filter states. More... | |
| struct | RobotLocalization::Measurement |
| Structure used for storing and comparing measurements (for priority queues) More... | |
Namespaces | |
| namespace | RobotLocalization |
Typedefs | |
| typedef boost::shared_ptr < FilterState > | RobotLocalization::FilterStatePtr |
| typedef boost::shared_ptr < Measurement > | RobotLocalization::MeasurementPtr |