This is a simple filter which reduces a trajectory to N points or less. More...
#include <n_point_filter.h>
Public Member Functions | |
| virtual bool | configure () |
| FilterBase method for the sub class to configure the filter This function must be implemented in the derived class. | |
| NPointFilter () | |
| Default constructor. | |
| bool | update (const T &trajectory_in, T &trajectory_out) |
| Reduces a trajectory to N points or less. The resulting trajectory contains only point within the original trajectory (no interpolation is done between points). | |
| ~NPointFilter () | |
| Default destructor. | |
Private Attributes | |
| int | n_points_ |
| number of points to reduce trajectory to | |
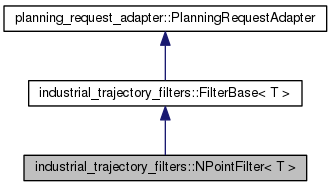
Detailed Description
template<typename T>
class industrial_trajectory_filters::NPointFilter< T >
This is a simple filter which reduces a trajectory to N points or less.
Definition at line 45 of file n_point_filter.h.
Constructor & Destructor Documentation
| NPointFilter::NPointFilter | ( | ) |
Default constructor.
Definition at line 41 of file n_point_filter.cpp.
| NPointFilter::~NPointFilter | ( | ) |
Default destructor.
Definition at line 51 of file n_point_filter.cpp.
Member Function Documentation
| bool NPointFilter::configure | ( | ) | [virtual] |
FilterBase method for the sub class to configure the filter This function must be implemented in the derived class.
- Returns:
- true if successful, otherwise false.
Implements industrial_trajectory_filters::FilterBase< T >.
Definition at line 56 of file n_point_filter.cpp.
| bool NPointFilter::update | ( | const T & | trajectory_in, |
| T & | trajectory_out | ||
| ) | [virtual] |
Reduces a trajectory to N points or less. The resulting trajectory contains only point within the original trajectory (no interpolation is done between points).
- Parameters:
-
trajectory_in input trajectory trajectory_out filtered trajectory (N points or less
- Returns:
- true if successful
Implements industrial_trajectory_filters::FilterBase< T >.
Definition at line 74 of file n_point_filter.cpp.
Member Data Documentation
int industrial_trajectory_filters::NPointFilter< T >::n_points_ [private] |
number of points to reduce trajectory to
Definition at line 78 of file n_point_filter.h.
The documentation for this class was generated from the following files: