#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/PoseWithCovarianceStamped.h>#include <humanoid_nav_msgs/PlanFootsteps.h>#include <humanoid_nav_msgs/PlanFootstepsBetweenFeet.h>#include <footstep_planner/helper.h>#include <footstep_planner/PathCostHeuristic.h>#include <footstep_planner/FootstepPlannerEnvironment.h>#include <footstep_planner/PlanningStateChangeQuery.h>#include <footstep_planner/State.h>#include <nav_msgs/Path.h>#include <nav_msgs/OccupancyGrid.h>#include <ros/ros.h>#include <sensor_msgs/PointCloud.h>#include <tf/tf.h>#include <visualization_msgs/Marker.h>#include <visualization_msgs/MarkerArray.h>#include <XmlRpcValue.h>#include <XmlRpcException.h>#include <assert.h>#include <time.h>
Include dependency graph for FootstepPlanner.h:

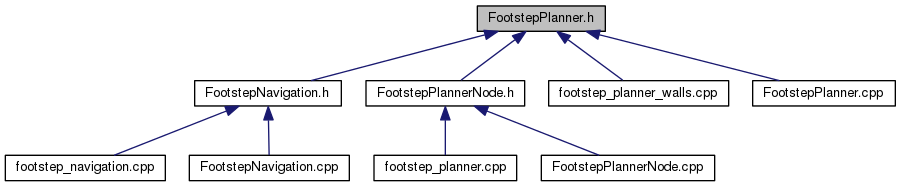
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | footstep_planner::FootstepPlanner |
| A class to control the interaction between ROS and the footstep planner. More... | |
Namespaces | |
| namespace | footstep_planner |
Typedefs | |
| typedef std::vector< State > ::const_iterator | footstep_planner::state_iter_t |