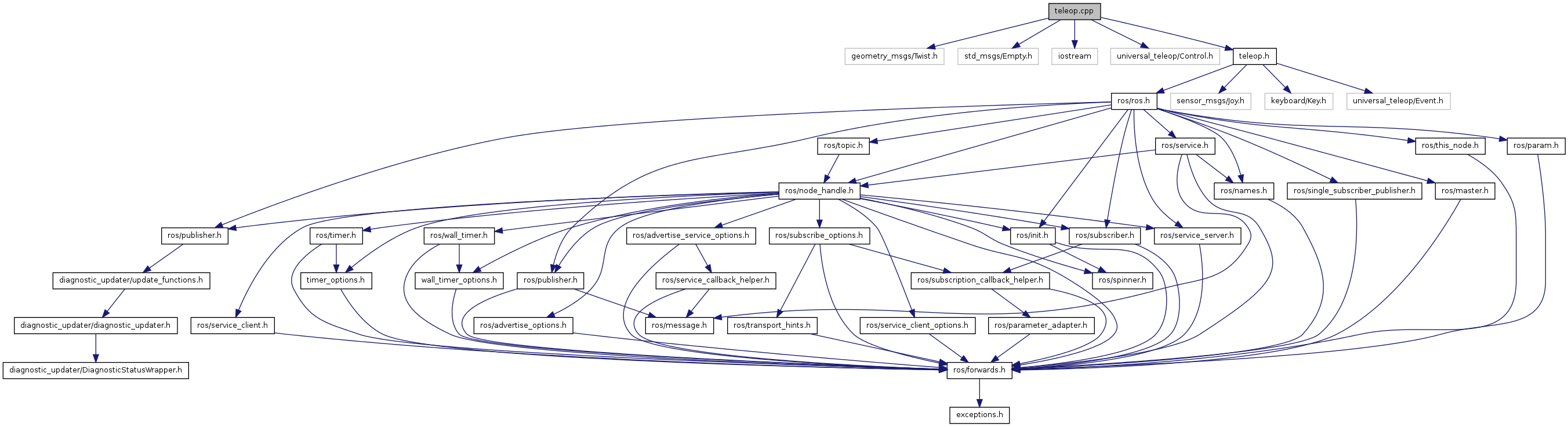
#include <geometry_msgs/Twist.h>#include <std_msgs/Empty.h>#include <iostream>#include "universal_teleop/Control.h"#include "teleop.h"
Include dependency graph for teleop.cpp:
#include <geometry_msgs/Twist.h>#include <std_msgs/Empty.h>#include <iostream>#include "universal_teleop/Control.h"#include "teleop.h"