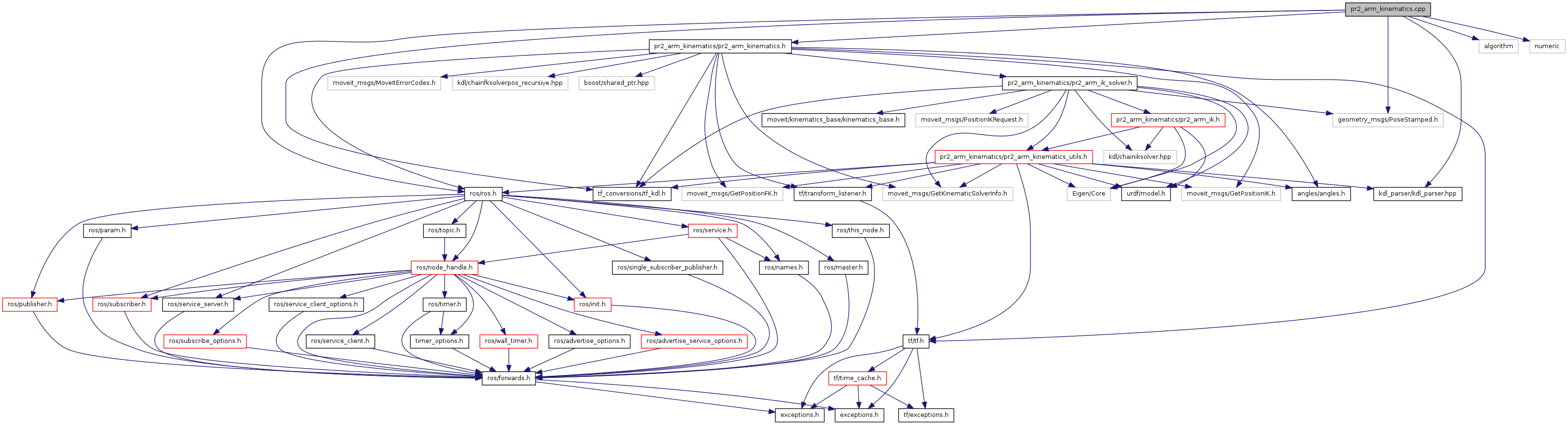
#include <pr2_arm_kinematics/pr2_arm_kinematics.h>#include <geometry_msgs/PoseStamped.h>#include <kdl_parser/kdl_parser.hpp>#include <tf_conversions/tf_kdl.h>#include "ros/ros.h"#include <algorithm>#include <numeric>
Include dependency graph for pr2_arm_kinematics.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | pr2_arm_kinematics |
Namespace for the PR2ArmKinematics. | |
Variables | |
| static const std::string | pr2_arm_kinematics::FK_INFO_SERVICE = "get_fk_solver_info" |
| static const std::string | pr2_arm_kinematics::FK_SERVICE = "get_fk" |
| static const std::string | pr2_arm_kinematics::IK_INFO_SERVICE = "get_ik_solver_info" |
| static const std::string | pr2_arm_kinematics::IK_SERVICE = "get_ik" |