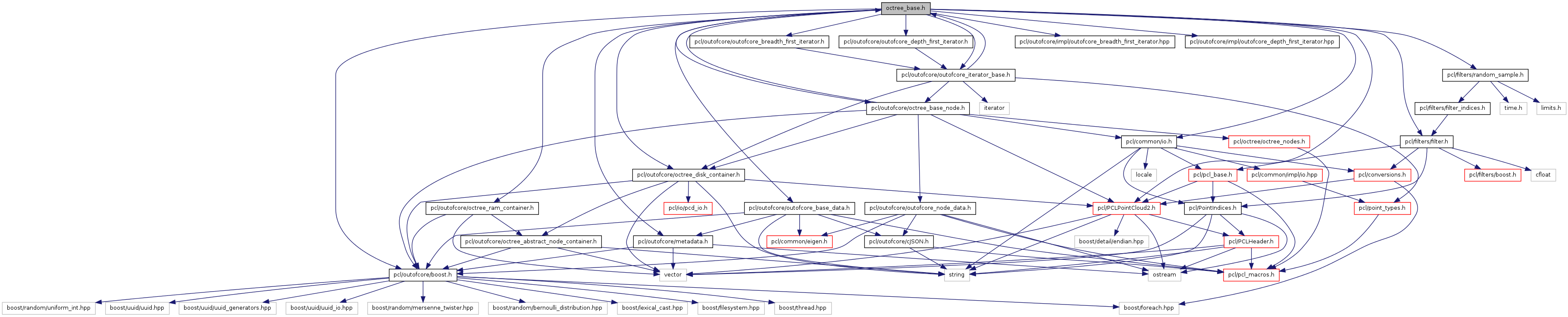
#include <pcl/outofcore/boost.h>#include <pcl/common/io.h>#include <pcl/outofcore/octree_base_node.h>#include <pcl/outofcore/octree_disk_container.h>#include <pcl/outofcore/octree_ram_container.h>#include <pcl/outofcore/outofcore_iterator_base.h>#include <pcl/outofcore/outofcore_breadth_first_iterator.h>#include <pcl/outofcore/outofcore_depth_first_iterator.h>#include <pcl/outofcore/impl/outofcore_breadth_first_iterator.hpp>#include <pcl/outofcore/impl/outofcore_depth_first_iterator.hpp>#include <pcl/outofcore/metadata.h>#include <pcl/outofcore/outofcore_base_data.h>#include <pcl/filters/filter.h>#include <pcl/filters/random_sample.h>#include <pcl/PCLPointCloud2.h>
Include dependency graph for outofcore/include/pcl/outofcore/octree_base.h:
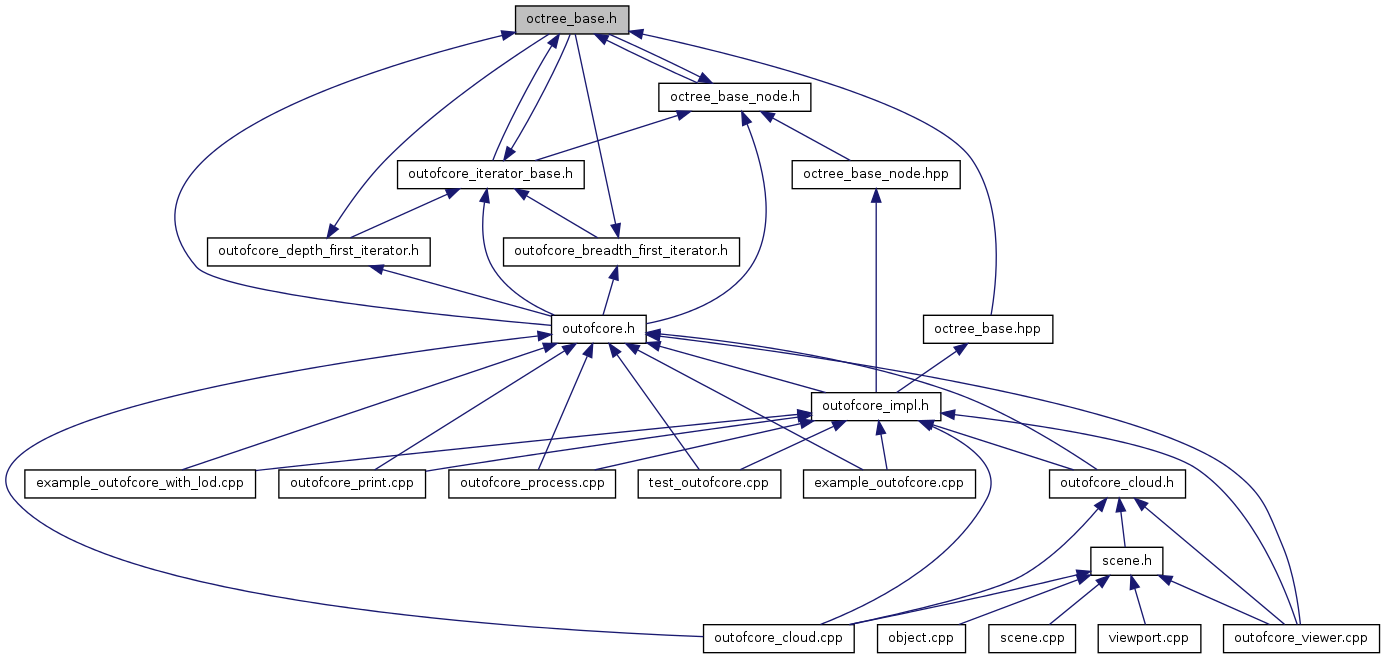
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::outofcore::OutofcoreOctreeBase< ContainerT, PointT > |
| This code defines the octree used for point storage at Urban Robotics. More... | |
| struct | pcl::outofcore::OutofcoreParams |
Namespaces | |
| namespace | pcl |
| namespace | pcl::outofcore |