#include <jsk_footstep_msgs/Footstep.h>#include <pcl/kdtree/kdtree_flann.h>#include <pcl/filters/crop_box.h>#include <pcl/sample_consensus/method_types.h>#include <pcl/sample_consensus/model_types.h>#include <pcl/segmentation/sac_segmentation.h>#include <pcl/filters/project_inliers.h>#include <pcl/search/octree.h>#include "jsk_footstep_planner/ann_grid.h"#include "jsk_footstep_planner/util.h"
Include dependency graph for footstep_state.h:

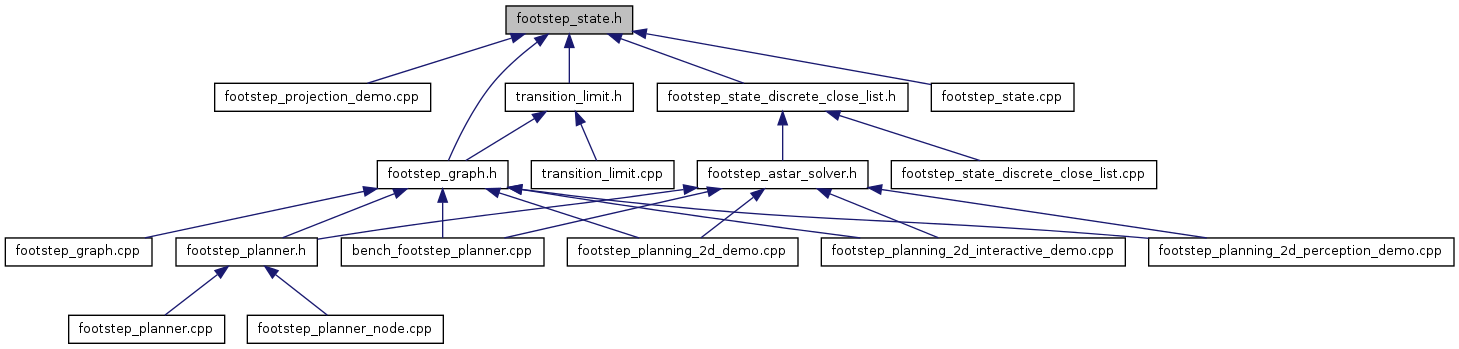
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.