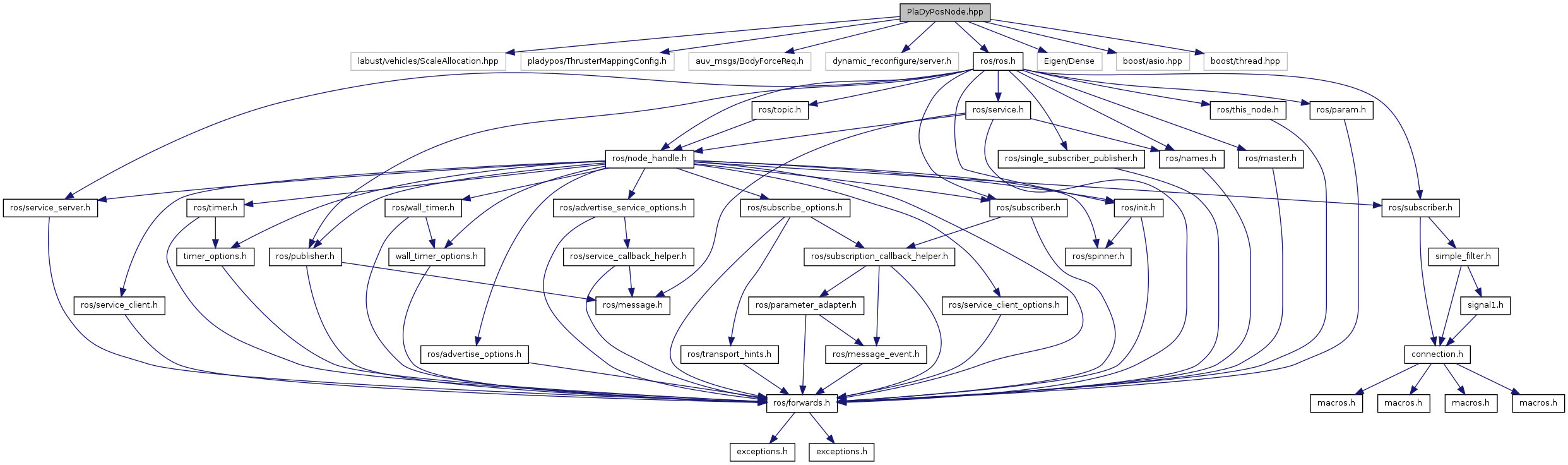
#include <labust/vehicles/ScaleAllocation.hpp>#include <pladypos/ThrusterMappingConfig.h>#include <auv_msgs/BodyForceReq.h>#include <dynamic_reconfigure/server.h>#include <ros/ros.h>#include <Eigen/Dense>#include <boost/asio.hpp>#include <boost/thread.hpp>
Include dependency graph for PlaDyPosNode.hpp:
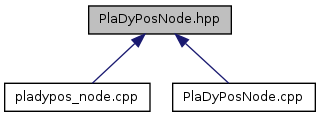
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | labust::vehicles::PlaDyPosNode |
Namespaces | |
| namespace | labust |
| namespace | labust::vehicles |