#include <pcl/features/feature.h>
Include dependency graph for rsd.h:
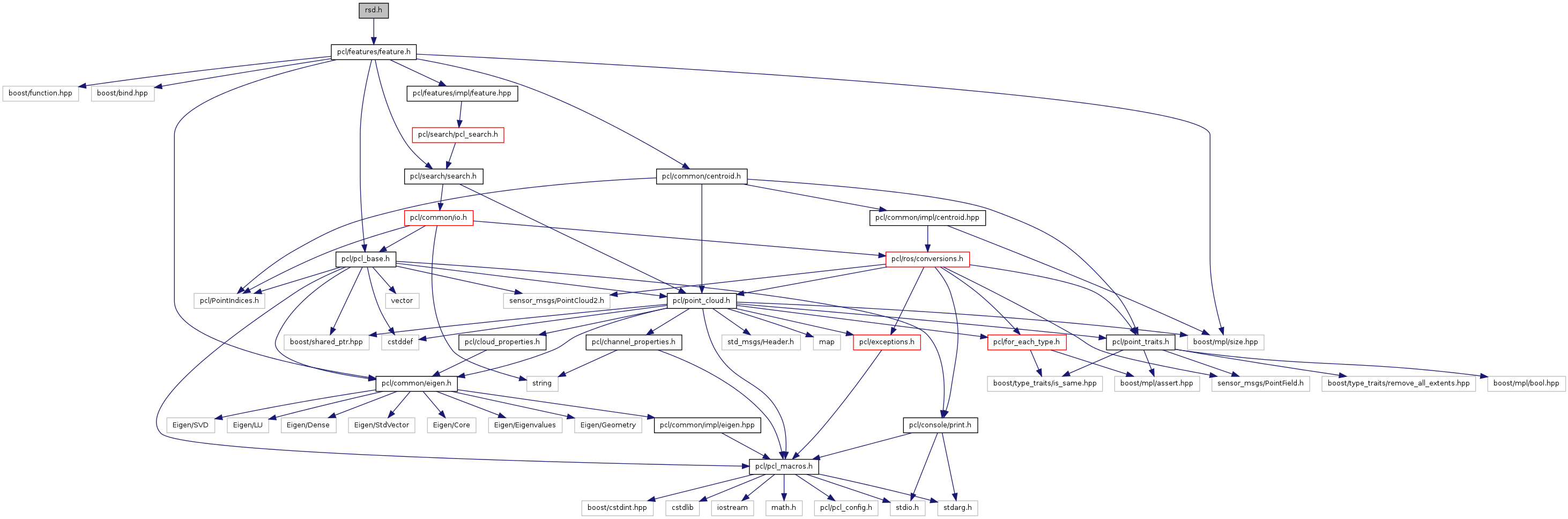
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::RSDEstimation< PointInT, PointNT, PointOutT > |
| RSDEstimation estimates the Radius-based Surface Descriptor (minimal and maximal radius of the local surface's curves) for a given point cloud dataset containing points and normals. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename PointInT , typename PointNT , typename PointOutT > | |
| Eigen::MatrixXf | pcl::computeRSD (boost::shared_ptr< const pcl::PointCloud< PointInT > > &surface, boost::shared_ptr< const pcl::PointCloud< PointNT > > &normals, const std::vector< int > &indices, double max_dist, int nr_subdiv, double plane_radius, PointOutT &radii, bool compute_histogram=false) |
| Estimate the Radius-based Surface Descriptor (RSD) for a given point based on its spatial neighborhood of 3D points with normals. | |
| template<typename PointNT , typename PointOutT > | |
| Eigen::MatrixXf | pcl::computeRSD (boost::shared_ptr< const pcl::PointCloud< PointNT > > &normals, const std::vector< int > &indices, const std::vector< float > &sqr_dists, double max_dist, int nr_subdiv, double plane_radius, PointOutT &radii, bool compute_histogram=false) |
| Estimate the Radius-based Surface Descriptor (RSD) for a given point based on its spatial neighborhood of 3D points with normals. | |
| template<int N> | |
| void | pcl::getFeaturePointCloud (const std::vector< Eigen::MatrixXf, Eigen::aligned_allocator< Eigen::MatrixXf > > &histograms2D, PointCloud< Histogram< N > > &histogramsPC) |
| Transform a list of 2D matrices into a point cloud containing the values in a vector (Histogram<N>). Can be used to transform the 2D histograms obtained in RSDEstimation into a point cloud. | |