PassThrough uses the base Filter class methods to pass through all data that satisfies the user given constraints. More...
#include <passthrough.h>
Public Member Functions | |
| std::string const | getFilterFieldName () |
| Get the name of the field used for filtering. | |
| void | getFilterLimits (double &limit_min, double &limit_max) |
| Get the field filter limits (min/max) set by the user. The default values are -FLT_MAX, FLT_MAX. | |
| void | getFilterLimitsNegative (bool &limit_negative) |
| Get whether the data outside the interval (min/max) is to be returned (true) or inside (false). | |
| bool | getFilterLimitsNegative () |
| Get whether the data outside the interval (min/max) is to be returned (true) or inside (false). | |
| bool | getKeepOrganized () |
| Obtain the value of the internal keep_organized_ parameter. | |
| PassThrough (bool extract_removed_indices=false) | |
| Constructor. | |
| void | setFilterFieldName (const std::string &field_name) |
| Provide the name of the field to be used for filtering data. In conjunction with setFilterLimits, points having values outside this interval will be discarded. | |
| void | setFilterLimits (const double &limit_min, const double &limit_max) |
| Set the field filter limits. All points having field values outside this interval will be discarded. | |
| void | setFilterLimitsNegative (const bool limit_negative) |
| Set to true if we want to return the data outside the interval specified by setFilterLimits (min, max). Default: false. | |
| void | setKeepOrganized (bool val) |
| Set whether the filtered points should be kept and set to the value given through setUserFilterValue (default: NaN), or removed from the PointCloud, thus potentially breaking its organized structure. By default, points are removed. | |
| void | setUserFilterValue (float val) |
| Provide a value that the filtered points should be set to instead of removing them. Used in conjunction with setKeepOrganized (). | |
Protected Member Functions | |
| void | applyFilter (PointCloud2 &output) |
| Abstract filter method. | |
Private Types | |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud2::ConstPtr | PointCloud2ConstPtr |
| typedef PointCloud2::Ptr | PointCloud2Ptr |
Private Attributes | |
| std::string | filter_field_name_ |
| The desired user filter field name. | |
| double | filter_limit_max_ |
| The maximum allowed filter value a point will be considered from. | |
| double | filter_limit_min_ |
| The minimum allowed filter value a point will be considered from. | |
| bool | filter_limit_negative_ |
| Set to true if we want to return the data outside (filter_limit_min_;filter_limit_max_). Default: false. | |
| bool | keep_organized_ |
| Keep the structure of the data organized, by setting the filtered points to the a user given value (NaN by default). | |
| float | user_filter_value_ |
| User given value to be set to any filtered point. Casted to the correct field type. | |
Detailed Description
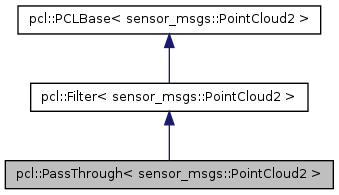
template<>
class pcl::PassThrough< sensor_msgs::PointCloud2 >
PassThrough uses the base Filter class methods to pass through all data that satisfies the user given constraints.
Definition at line 224 of file passthrough.h.
Member Typedef Documentation
typedef sensor_msgs::PointCloud2 pcl::PassThrough< sensor_msgs::PointCloud2 >::PointCloud2 [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 226 of file passthrough.h.
typedef PointCloud2::ConstPtr pcl::PassThrough< sensor_msgs::PointCloud2 >::PointCloud2ConstPtr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 228 of file passthrough.h.
typedef PointCloud2::Ptr pcl::PassThrough< sensor_msgs::PointCloud2 >::PointCloud2Ptr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 227 of file passthrough.h.
Constructor & Destructor Documentation
| pcl::PassThrough< sensor_msgs::PointCloud2 >::PassThrough | ( | bool | extract_removed_indices = false | ) | [inline] |
Constructor.
Definition at line 235 of file passthrough.h.
Member Function Documentation
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::applyFilter | ( | PointCloud2 & | output | ) | [protected, virtual] |
Abstract filter method.
The implementation needs to set output.{data, row_step, point_step, width, height, is_dense}.
- Parameters:
-
[out] output the resultant filtered point cloud
Implements pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 45 of file filters/src/passthrough.cpp.
| std::string const pcl::PassThrough< sensor_msgs::PointCloud2 >::getFilterFieldName | ( | ) | [inline] |
Get the name of the field used for filtering.
Definition at line 288 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::getFilterLimits | ( | double & | limit_min, |
| double & | limit_max | ||
| ) | [inline] |
Get the field filter limits (min/max) set by the user. The default values are -FLT_MAX, FLT_MAX.
- Parameters:
-
[out] limit_min the minimum allowed field value [out] limit_max the maximum allowed field value
Definition at line 309 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::getFilterLimitsNegative | ( | bool & | limit_negative | ) | [inline] |
Get whether the data outside the interval (min/max) is to be returned (true) or inside (false).
- Parameters:
-
[out] limit_negative true if data outside the interval [min; max] is to be returned, false otherwise
Definition at line 329 of file passthrough.h.
| bool pcl::PassThrough< sensor_msgs::PointCloud2 >::getFilterLimitsNegative | ( | ) | [inline] |
Get whether the data outside the interval (min/max) is to be returned (true) or inside (false).
- Returns:
- true if data outside the interval [min; max] is to be returned, false otherwise
Definition at line 338 of file passthrough.h.
| bool pcl::PassThrough< sensor_msgs::PointCloud2 >::getKeepOrganized | ( | ) | [inline] |
Obtain the value of the internal keep_organized_ parameter.
Definition at line 260 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setFilterFieldName | ( | const std::string & | field_name | ) | [inline] |
Provide the name of the field to be used for filtering data. In conjunction with setFilterLimits, points having values outside this interval will be discarded.
- Parameters:
-
[in] field_name the name of the field that contains values used for filtering
Definition at line 281 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setFilterLimits | ( | const double & | limit_min, |
| const double & | limit_max | ||
| ) | [inline] |
Set the field filter limits. All points having field values outside this interval will be discarded.
- Parameters:
-
[in] limit_min the minimum allowed field value [in] limit_max the maximum allowed field value
Definition at line 298 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setFilterLimitsNegative | ( | const bool | limit_negative | ) | [inline] |
Set to true if we want to return the data outside the interval specified by setFilterLimits (min, max). Default: false.
- Parameters:
-
[in] limit_negative return data inside the interval (false) or outside (true)
Definition at line 320 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setKeepOrganized | ( | bool | val | ) | [inline] |
Set whether the filtered points should be kept and set to the value given through setUserFilterValue (default: NaN), or removed from the PointCloud, thus potentially breaking its organized structure. By default, points are removed.
- Parameters:
-
[in] val set to true whether the filtered points should be kept and set to a given user value (default: NaN)
Definition at line 253 of file passthrough.h.
| void pcl::PassThrough< sensor_msgs::PointCloud2 >::setUserFilterValue | ( | float | val | ) | [inline] |
Provide a value that the filtered points should be set to instead of removing them. Used in conjunction with setKeepOrganized ().
- Parameters:
-
[in] val the user given value that the filtered point dimensions should be set to
Definition at line 271 of file passthrough.h.
Member Data Documentation
std::string pcl::PassThrough< sensor_msgs::PointCloud2 >::filter_field_name_ [private] |
The desired user filter field name.
Definition at line 359 of file passthrough.h.
double pcl::PassThrough< sensor_msgs::PointCloud2 >::filter_limit_max_ [private] |
The maximum allowed filter value a point will be considered from.
Definition at line 365 of file passthrough.h.
double pcl::PassThrough< sensor_msgs::PointCloud2 >::filter_limit_min_ [private] |
The minimum allowed filter value a point will be considered from.
Definition at line 362 of file passthrough.h.
bool pcl::PassThrough< sensor_msgs::PointCloud2 >::filter_limit_negative_ [private] |
Set to true if we want to return the data outside (filter_limit_min_;filter_limit_max_). Default: false.
Definition at line 368 of file passthrough.h.
bool pcl::PassThrough< sensor_msgs::PointCloud2 >::keep_organized_ [private] |
Keep the structure of the data organized, by setting the filtered points to the a user given value (NaN by default).
Definition at line 351 of file passthrough.h.
float pcl::PassThrough< sensor_msgs::PointCloud2 >::user_filter_value_ [private] |
User given value to be set to any filtered point. Casted to the correct field type.
Definition at line 356 of file passthrough.h.
The documentation for this class was generated from the following files: