NormalEstimationOMP estimates local surface properties at each 3D point, such as surface normals and curvatures, in parallel, using the OpenMP standard. More...
#include <normal_3d_omp.h>
Public Member Functions | |
| NormalEstimationOMP () | |
| Default constructor. | |
| NormalEstimationOMP (unsigned int nr_threads) | |
| Initialize the scheduler and set the number of threads to use. | |
Private Member Functions | |
| void | compute (pcl::PointCloud< pcl::Normal > &) |
| Make the compute (&PointCloudOut); inaccessible from outside the class. | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &output) |
| Estimate normals for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Detailed Description
template<typename PointInT>
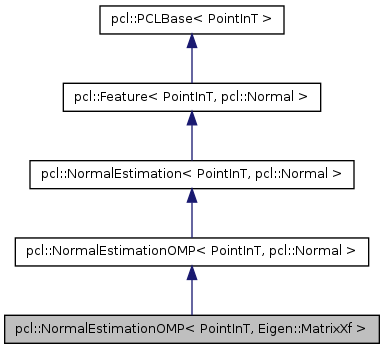
class pcl::NormalEstimationOMP< PointInT, Eigen::MatrixXf >
NormalEstimationOMP estimates local surface properties at each 3D point, such as surface normals and curvatures, in parallel, using the OpenMP standard.
Definition at line 120 of file normal_3d_omp.h.
Constructor & Destructor Documentation
| pcl::NormalEstimationOMP< PointInT, Eigen::MatrixXf >::NormalEstimationOMP | ( | ) | [inline] |
Default constructor.
Reimplemented from pcl::NormalEstimationOMP< PointInT, pcl::Normal >.
Definition at line 134 of file normal_3d_omp.h.
| pcl::NormalEstimationOMP< PointInT, Eigen::MatrixXf >::NormalEstimationOMP | ( | unsigned int | nr_threads | ) | [inline] |
Initialize the scheduler and set the number of threads to use.
- Parameters:
-
nr_threads the number of hardware threads to use (-1 sets the value back to automatic)
Reimplemented from pcl::NormalEstimationOMP< PointInT, pcl::Normal >.
Definition at line 139 of file normal_3d_omp.h.
Member Function Documentation
| void pcl::NormalEstimationOMP< PointInT, Eigen::MatrixXf >::compute | ( | pcl::PointCloud< pcl::Normal > & | ) | [inline, private] |
Make the compute (&PointCloudOut); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Reimplemented from pcl::Feature< PointInT, pcl::Normal >.
Definition at line 153 of file normal_3d_omp.h.
| void pcl::NormalEstimationOMP< PointInT, Eigen::MatrixXf >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | output | ) | [private, virtual] |
Estimate normals for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters:
-
output the resultant point cloud model dataset that contains surface normals and curvatures
Reimplemented from pcl::NormalEstimationOMP< PointInT, pcl::Normal >.
Definition at line 47 of file normal_3d_omp.hpp.
The documentation for this class was generated from the following files: