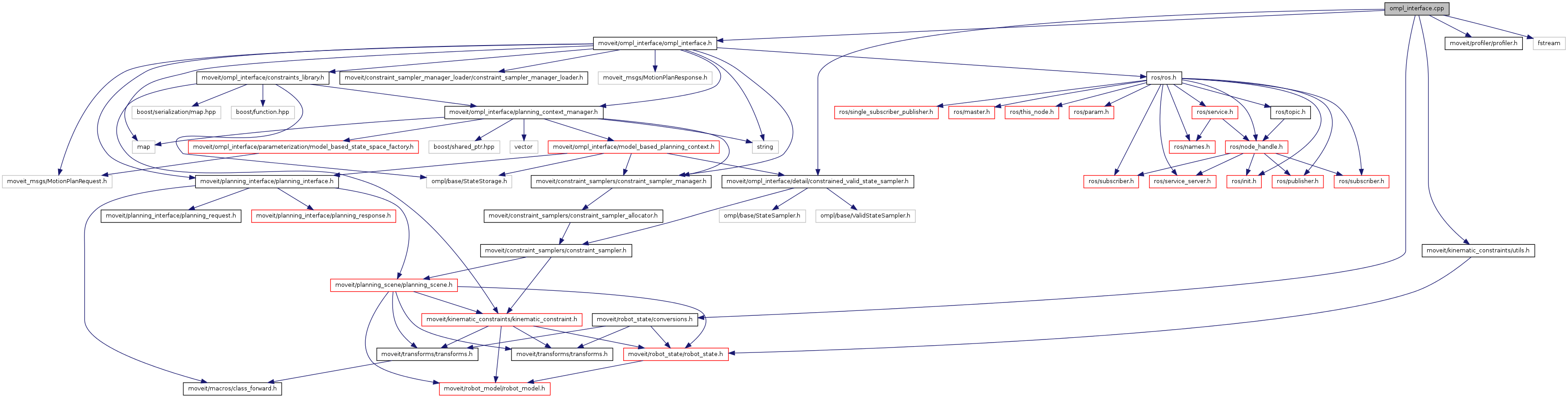
#include <moveit/ompl_interface/ompl_interface.h>#include <moveit/robot_state/conversions.h>#include <moveit/kinematic_constraints/utils.h>#include <moveit/ompl_interface/detail/constrained_valid_state_sampler.h>#include <moveit/profiler/profiler.h>#include <fstream>
Include dependency graph for ompl_interface.cpp: