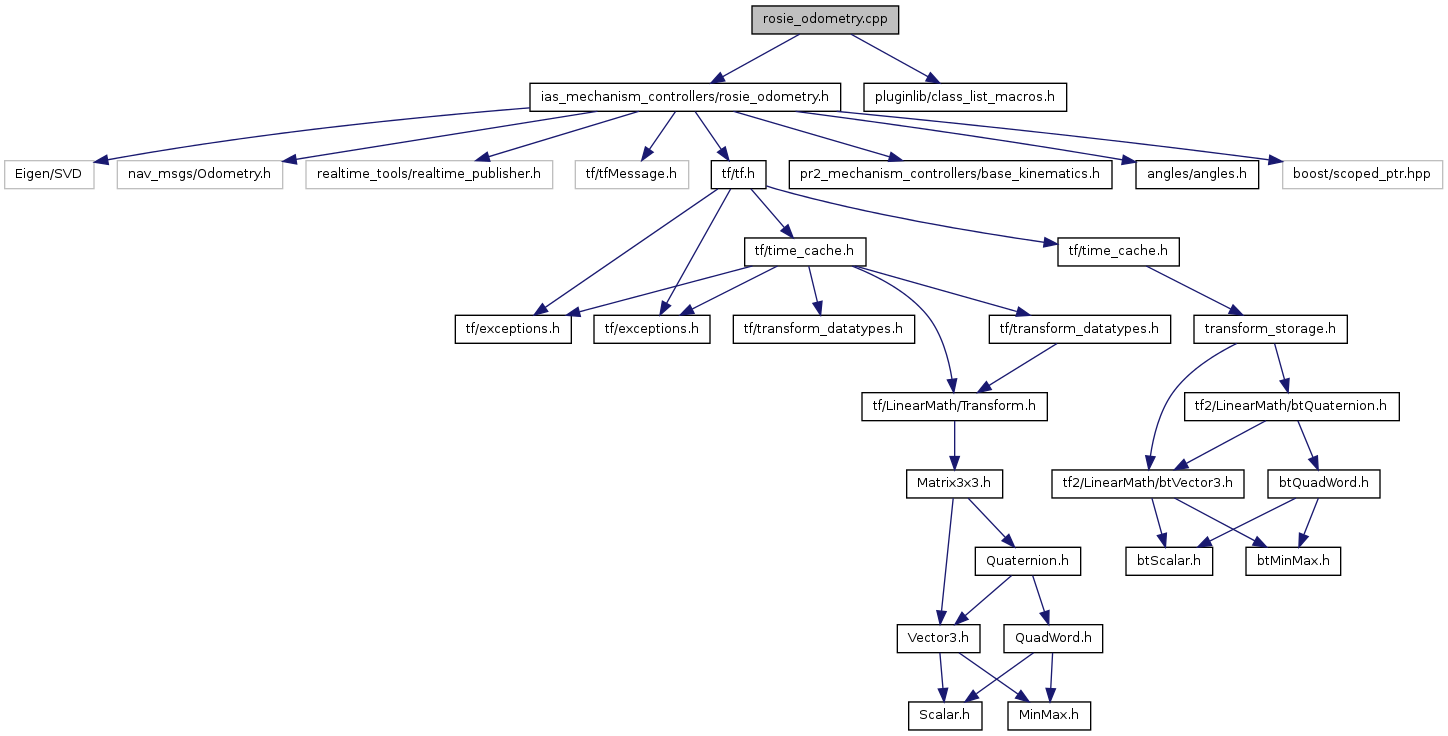
#include "ias_mechanism_controllers/rosie_odometry.h"
#include "pluginlib/class_list_macros.h"
Go to the source code of this file.