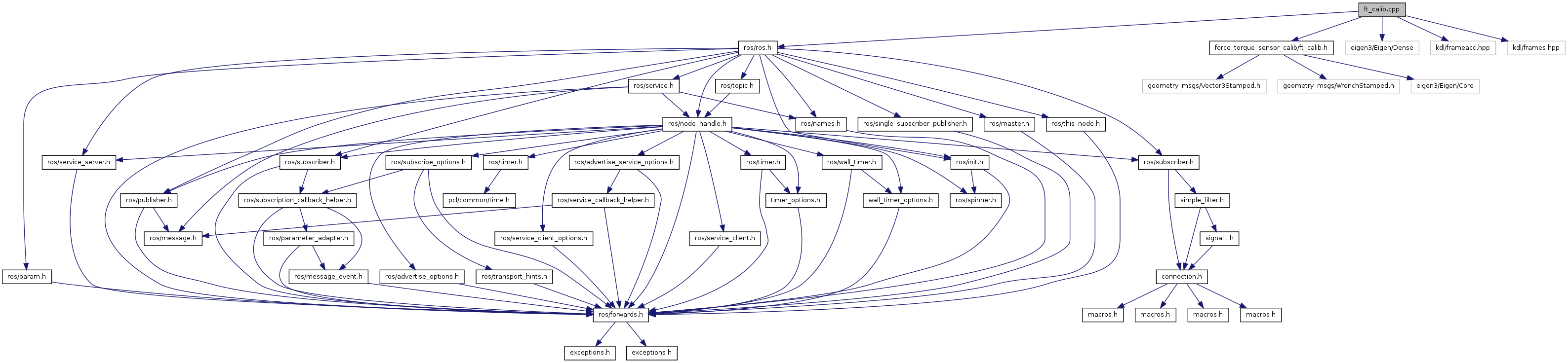
#include <ros/ros.h>#include <force_torque_sensor_calib/ft_calib.h>#include <eigen3/Eigen/Dense>#include <kdl/frameacc.hpp>#include <kdl/frames.hpp>
Include dependency graph for ft_calib.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | Calibration |