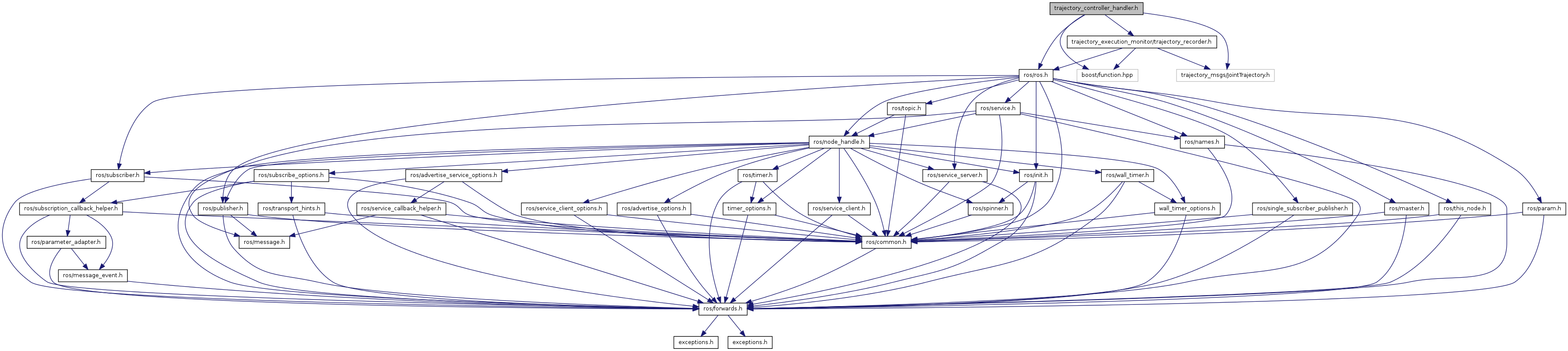
#include <ros/ros.h>
#include <boost/function.hpp>
#include <trajectory_msgs/JointTrajectory.h>
#include <trajectory_execution_monitor/trajectory_recorder.h>
Go to the source code of this file.
Classes |
| class | trajectory_execution_monitor::TrajectoryControllerHandler |
| | Sets up the controller for execution, handles the responses, and times-out the controller if necessary. More...
|
Namespaces |
| namespace | trajectory_execution_monitor |
| namespace | trajectory_execution_monitor::TrajectoryControllerStates |
Typedefs |
typedef
TrajectoryControllerStates::TrajectoryControllerState | trajectory_execution_monitor::TrajectoryControllerState |
| typedef boost::function< void(TrajectoryControllerState)> | trajectory_execution_monitor::TrajectoryFinishedCallbackFunction |
| | Callback gets called when the controller is finished, or the controller has timed-out.
|
Enumerations |
| enum | trajectory_execution_monitor::TrajectoryControllerStates::TrajectoryControllerState {
trajectory_execution_monitor::TrajectoryControllerStates::IDLE = 0,
trajectory_execution_monitor::TrajectoryControllerStates::PAUSED,
trajectory_execution_monitor::TrajectoryControllerStates::EXECUTING,
trajectory_execution_monitor::TrajectoryControllerStates::OVERSHOOTING,
trajectory_execution_monitor::TrajectoryControllerStates::SUCCESS,
trajectory_execution_monitor::TrajectoryControllerStates::OVERSHOOT_TIMEOUT,
trajectory_execution_monitor::TrajectoryControllerStates::EXECUTION_FAILURE,
trajectory_execution_monitor::TrajectoryControllerStates::EXECUTION_TIMEOUT,
trajectory_execution_monitor::TrajectoryControllerStates::CANCELLED
} |
| | Possible states the controller could be in during execution. More...
|