For PCL inclusion requirements. More...
#include "general_resources.hpp"#include "pcl/point_cloud.h"#include "sensor_msgs/point_cloud_conversion.h"#include <pcl/ros/conversions.h>#include <pcl/point_types.h>#include <pcl/io/pcd_io.h>
Include dependency graph for pcl_resources.hpp:

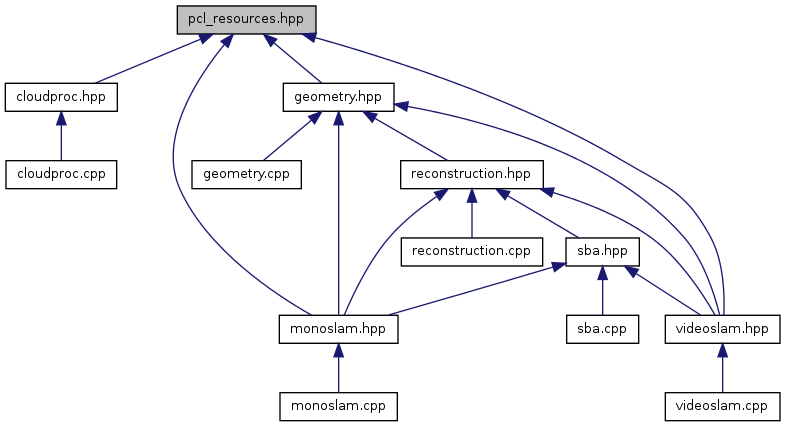
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Detailed Description
For PCL inclusion requirements.
Definition in file pcl_resources.hpp.