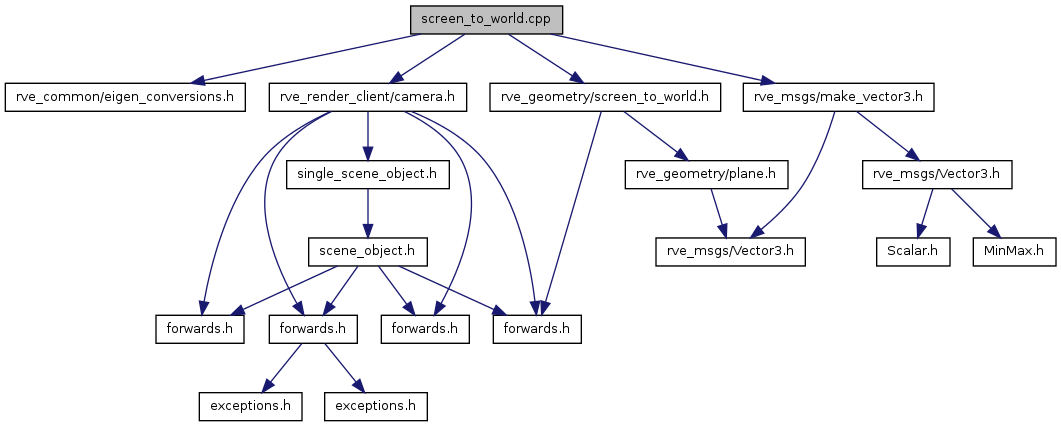
#include <rve_common/eigen_conversions.h>#include <rve_render_client/camera.h>#include <rve_msgs/make_vector3.h>#include "rve_geometry/screen_to_world.h"
Include dependency graph for screen_to_world.cpp:
Go to the source code of this file.
Classes | |
| class | rve_geometry::Ray |
Namespaces | |
| namespace | rve_geometry |
Functions | |
| static Eigen::Matrix3f | rve_geometry::compute_view_to_robot () |
| static Eigen::Matrix4f | rve_geometry::getViewMatrix (const rve_render_client::CameraPtr &camera) |
| bool | rve_geometry::screenToWorld (const Plane &world_plane, const rve_render_client::CameraPtr &camera, int screen_x, int screen_y, int screen_width, int screen_height, rve_msgs::Vector3 *position_output) |
Variables | |
| static Eigen::Matrix3f | rve_geometry::robot_to_view = view_to_robot.inverse() |
| static Eigen::Matrix3f | rve_geometry::view_to_robot = compute_view_to_robot() |