#include <ros/console.h>#include <cob_trajectory_controller/RefVal_JS.h>#include <vector>#include <cob_trajectory_controller/BSplineND.h>#include <trajectory_msgs/JointTrajectory.h>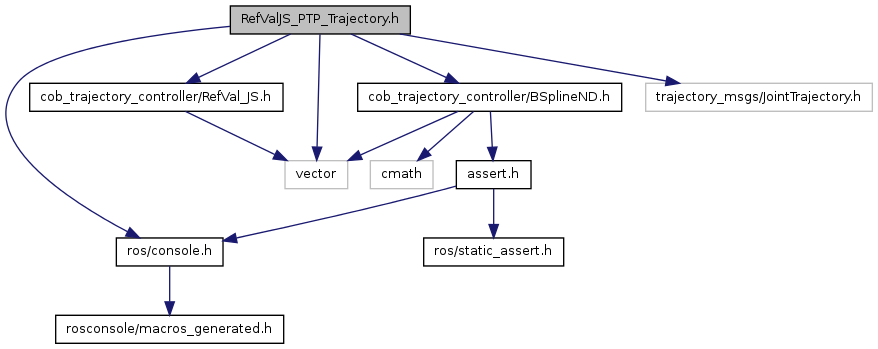
Go to the source code of this file.
Classes | |
| class | RefValJS_PTP_Trajectory |

