Classes representing continuously connected functions (splines) and some interpolation algorithms.
Include the following at the top of any translation unit that uses geometry functions or classes.
#include <ecl/geometry.hpp> // The classes using ecl::CubicSpline; using ecl::SmoothLinearSpline; using ecl::TensionSpline;
You will also need to link to -lecl_geometry.
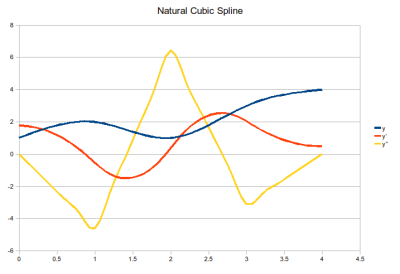
The CubicSpline has a relatively simple c++ interface.
The blueprints generate a cubic spline over a data set. Depending on the input constraints, the spline is generated rather differently. These can be accessed via static methods in the blueprint factory (ecl::BluePrintFactory< CubicSpline >) inherited by the CubicSpline class. For example:
CubicSpline cubic; cubic = CubicSpline::Natural(x_set, y_set); cubic = CubicSpline::ContinuousDerivatives(x_set, y_set, ydot_0, ydot_f); cubic = CubicSpline::DerivativeHeuristic(x_set, y_set, ydot_0, ydot_f);
Access allows you to calculate the value of the spline at any point on its domain:
std::cout << "Value : " << cubic(3.2) << std::endl; std::cout << "1st Derivative: " << cubic.derivative(3.2) << std::endl; std::cout << "2nd Derivative: " << cubic.dderivative(3.2) << std::endl;
Streaming will provide an algebraic list of the cubic polynomials constituting the spline.
std::cout << cubic << std::endl; // Typical output // 1.00 + 2.31x + 3.00x^2 + 1.23x^3 // 0.00 + 1.42x + 5.20x^2 + 1.06x^3
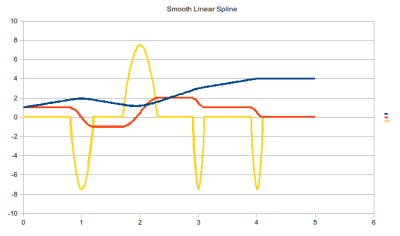
The SmoothLinearSpline simply linearly connects waypoints and adds a quintic polynomial curve to smooth the corners between each linear section. The shape of these corners is parameterised by a maximum curvature (acceleration) parameter.
Simply pass suitable x and y data sets along with a maximum curvature constraint parameter to the spline's constructor. Be sure to catch an exception if the construction should fail (this will occur if the maximum curvature constraint cannot be met).
double max_curvature = 5.0;
SmoothLinearSpline spline(x_set, y_set, max_curvature);
Access and streaming is similar to that for the cubic spline.
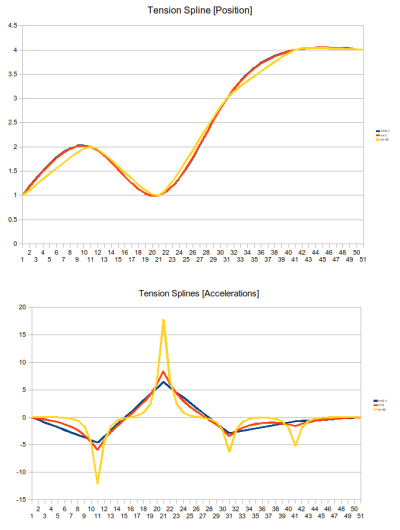
The TensionSpline represents a mathematically parameterised spline that portrays the whole family of splines from linearly connected segments through to cubic polynomials. To do this it uses the tension function. When connecting tension functions across a series of waypoints, the tension parameter provides this extra flexibility in controlling the shape of the spline.
Note that its primary advantages are that it is still C2 continuous and it is very easy to modify the resulting behaviour through tweaking of a single parameter.
There is currently only one blueprint (though variations are not difficult to create). It is very similar to the natural cubic spline (assumes zero boundary conditions for the second derivatives), the only difference being the addition of the tension parameter.
TensionSpline spline = TensionSpline::Natural(tension, x_set, y_set);
Access and streaming is similar to that for the cubic spline.