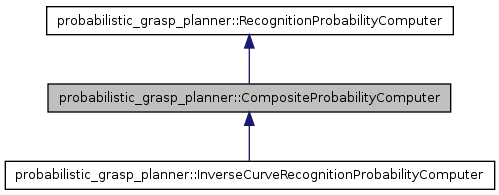
Computes the probability of each model by comparing its raw fit score to the score of the best model in the list. More...
#include <recognition_probability_computer.h>
Public Member Functions | |
| CompositeProbabilityComputer (bool db_only) | |
| virtual void | computeRepresentationProbabilities (std::vector< ObjectRepresentation > &objects) |
Protected Member Functions | |
| virtual double | getProbabilityForRecognitionScore (const double &score) |
Protected Attributes | |
| bool | db_only_ |
| Whether we should give cluster planner any weight. | |
| double | recognition_threshold_ |
| Raw fit results worse than this threshold get 0.0 probability. | |
Computes the probability of each model by comparing its raw fit score to the score of the best model in the list.
Definition at line 75 of file recognition_probability_computer.h.
| probabilistic_grasp_planner::CompositeProbabilityComputer::CompositeProbabilityComputer | ( | bool | db_only | ) | [inline] |
Definition at line 88 of file recognition_probability_computer.h.
| void probabilistic_grasp_planner::CompositeProbabilityComputer::computeRepresentationProbabilities | ( | std::vector< ObjectRepresentation > & | representations | ) | [virtual] |
Given a list of representations which describe the underlying real world object, assigns probabilities for each representation that the representation is the best description of the real object.
The probability that the object represented by the cluster is even in the database is (hopefully) the probability that the object matches the best model fit. Therefore, all of the model probabilities each get some share of the probability that the object is in the DB. The rest of the probability goes to model id -1, which is the probability that it is NOT in the DB (and therefore we should use the cluster grasp planner).
Assign the rest of the probability to the hypothesis "not in DB" for use by cluster planner
Implements probabilistic_grasp_planner::RecognitionProbabilityComputer.
Definition at line 90 of file recognition_probability_computer.cpp.
| double probabilistic_grasp_planner::CompositeProbabilityComputer::getProbabilityForRecognitionScore | ( | const double & | score | ) | [protected, virtual] |
Underlying algorithm to convert a recognition score (in meters, representing average distance between a correspondence pair between the model and the cloud) to a [0,1] probability.
do gaussian stuff
Reimplemented in probabilistic_grasp_planner::InverseCurveRecognitionProbabilityComputer.
Definition at line 69 of file recognition_probability_computer.cpp.
bool probabilistic_grasp_planner::CompositeProbabilityComputer::db_only_ [protected] |
Whether we should give cluster planner any weight.
Definition at line 82 of file recognition_probability_computer.h.
double probabilistic_grasp_planner::CompositeProbabilityComputer::recognition_threshold_ [protected] |
Raw fit results worse than this threshold get 0.0 probability.
Definition at line 79 of file recognition_probability_computer.h.

