#include <vector>#include <utility>#include <algorithm>#include <cmath>#include <cstdlib>#include <cvd/image.h>#include <cvd/convolution.h>#include <memory>#include <numeric>#include <cvd/config.h>#include <cvd/exceptions.h>#include <cvd/internal/pixel_operations.h>#include <cvd/internal/aligned_mem.h>#include <cvd/utility.h>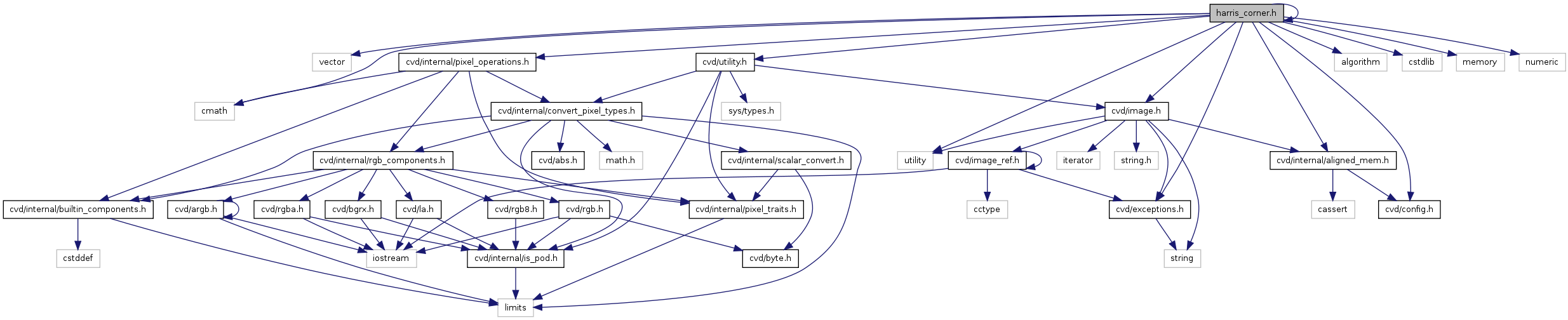
Go to the source code of this file.
Classes | |
| struct | CVD::Harris::HarrisScore |
| struct | CVD::Harris::PairInserter |
| struct | CVD::Harris::PosInserter |
| struct | CVD::Harris::ShiTomasiScore |
Namespaces | |
| namespace | CVD |
| namespace | CVD::Harris |
Functions | |
| template<class C > | |
| void | CVD::harris_corner_detect (const SubImage< C > &i, std::vector< ImageRef > &c, unsigned int N, float blur=1.0, float sigmas=3.0) |
| template<class Score , class Inserter , class C , class B > | |
| void | CVD::harrislike_corner_detect (const SubImage< B > &i, C &c, unsigned int N, float blur, float sigmas, BasicImage< float > &xx, BasicImage< float > &xy, BasicImage< float > &yy) |
| template<class C > | |
| void | CVD::shitomasi_corner_detect (const SubImage< C > &i, std::vector< ImageRef > &c, unsigned int N, float blur=1.0, float sigmas=3.0) |
| template<class C > | |
| C | CVD::Harris::sq (const C &c) |
| A Utility fuction. | |

