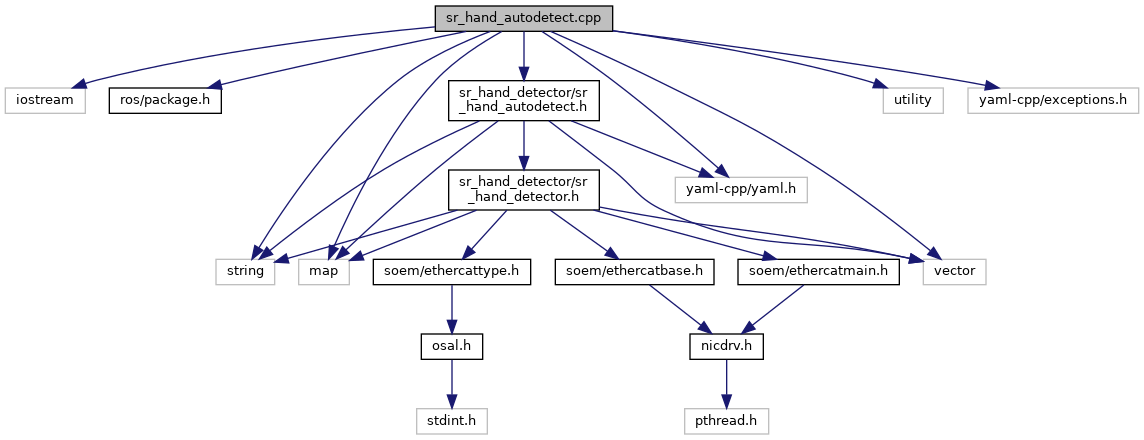
#include <iostream>#include <ros/package.h>#include <string>#include <utility>#include <map>#include <vector>#include "sr_hand_detector/sr_hand_autodetect.h"#include "yaml-cpp/yaml.h"#include "yaml-cpp/exceptions.h"
Include dependency graph for sr_hand_autodetect.cpp:
Go to the source code of this file.
Namespaces | |
| sr_hand_detector | |