Short overview of the SDHLibrary-CPP and SDH architecture
More...
Detailed Description
Short overview of the SDHLibrary-CPP and SDH architecture
Overview
- Naming convention:
- As a convention "SDH" (capital letters) is used to refer to the physical device, the three fingered SCHUNK Dexterous Hand, while "sdh" (small letters) refers to the PC-software that communicates with the physical SDH device. Within the "sdh" PC-software further entities can be distinguished: The C++ library SDHLibrary-CPP.so (on Linux) or SDHLibrary-CPP.dll (on Windows/cygwin) that contains the complete sdh library including the user interface class #SDH::cSDH. This #SDH::cSDH class will be described in detail below.
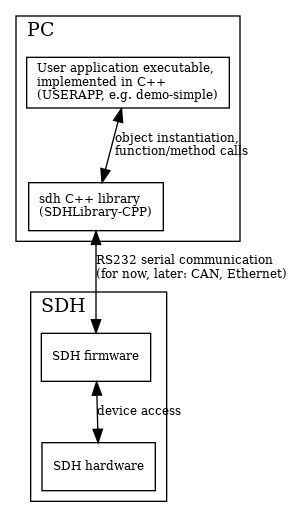
- Basic structure:
- The basic structure of the components looks like this:
- Basic architecture:
- There are several classes defined in SDHLibrary-CPP:
- #SDH::cSDH the class used to communicate with the SDH. This class provides the functional interface of the SDH. It should be used by end users, as its interface is considered more stable.
- Other classes, like cSDHBase and cSDHSerial, are used by #SDH::cSDH and provide more low level services and should NOT be used directly, as their interfaces are subject to change in future releases.
- cSDHLibraryException and derivatives: these are used when an exception is raised
- Example use:
- An exemplary use of the sdh module in a user application in C++ might look like this: ...// Include the cSDH interfaceinclude <sdh.h>// Create an instance "hand" of the class cSDH:cSDH hand;// Open communication to the SDH device via default serial port 0 == "COM1"hand.OpenRS232();// Perform some action:// get the current actual axis angles of finger 0std::vector<double> faa = hand.GetFingerActualAngle( 0 );// modify these by decreasing the proximal and the distal axis angles:std::vector<double> fta = faa;fta[1] -= 10;fta[2] -= 10;// set modified angles as new target angles:hand.SetFingerTargetAngle( 0, fta );// now make the finger move there:hand.MoveFinger( 0 );// Finally close connection to SDH again (This automatically// switches off the axis controllers to prevent overheating):hand.Close();
Real example code is available in the demo-*.cpp code files, see e.g.
Definition in file architecture.dox.