#include <robot_body_filter/utils/shapes.h>#include <ros/ros.h>#include <geometric_shapes/mesh_operations.h>#include <urdf_model/model.h>#include <robot_body_filter/utils/bodies.h>
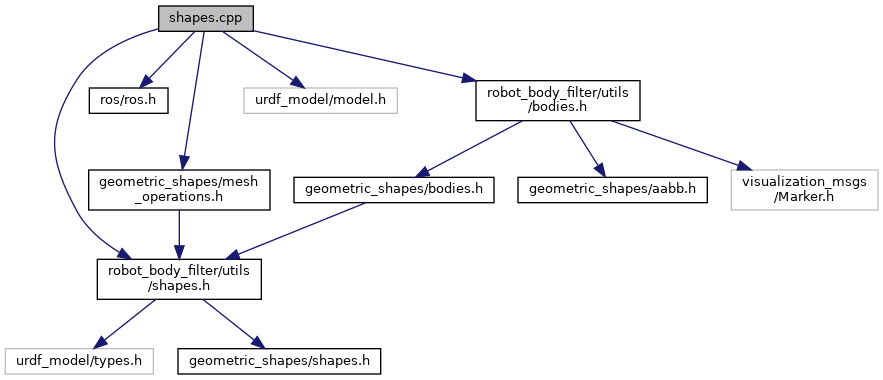
Include dependency graph for shapes.cpp:
#include <robot_body_filter/utils/shapes.h>#include <ros/ros.h>#include <geometric_shapes/mesh_operations.h>#include <urdf_model/model.h>#include <robot_body_filter/utils/bodies.h>