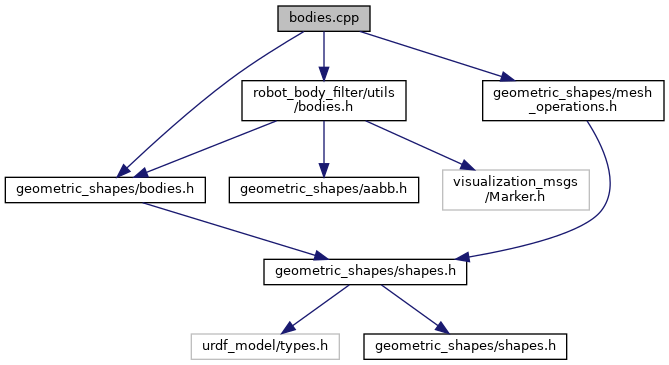
#include <robot_body_filter/utils/bodies.h>#include <geometric_shapes/bodies.h>#include <geometric_shapes/mesh_operations.h>
Include dependency graph for bodies.cpp:
Go to the source code of this file.
Namespaces | |
| bodies | |
Functions | |
| void | bodies::computeBoundingBoxAt (const bodies::Body *body, AxisAlignedBoundingBox &bbox, const Eigen::Isometry3d &pose) |
Compute AABB for the body at different pose. Can't use setPose() because we want body to be const. More... | |