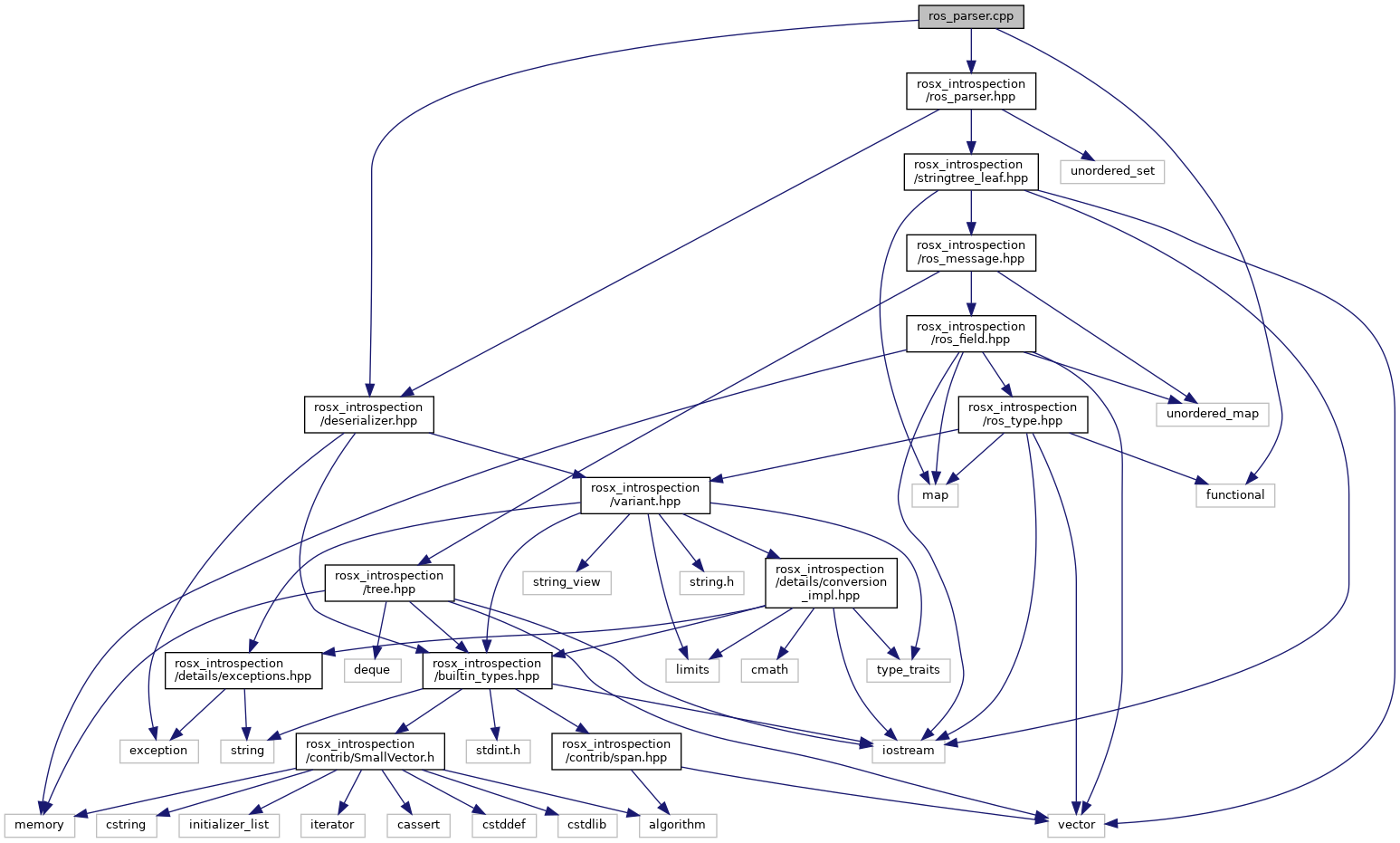
#include <functional>#include "rosx_introspection/ros_parser.hpp"#include "rosx_introspection/deserializer.hpp"
Include dependency graph for rosx_introspection/src/ros_parser.cpp:
Go to the source code of this file.
Namespaces | |
| RosMsgParser | |
Functions | |
| template<typename Container > | |
| void | RosMsgParser::ExpandVectorIfNecessary (Container &container, size_t new_size) |
| bool | RosMsgParser::operator== (const std::string &a, const std::string_view &b) |