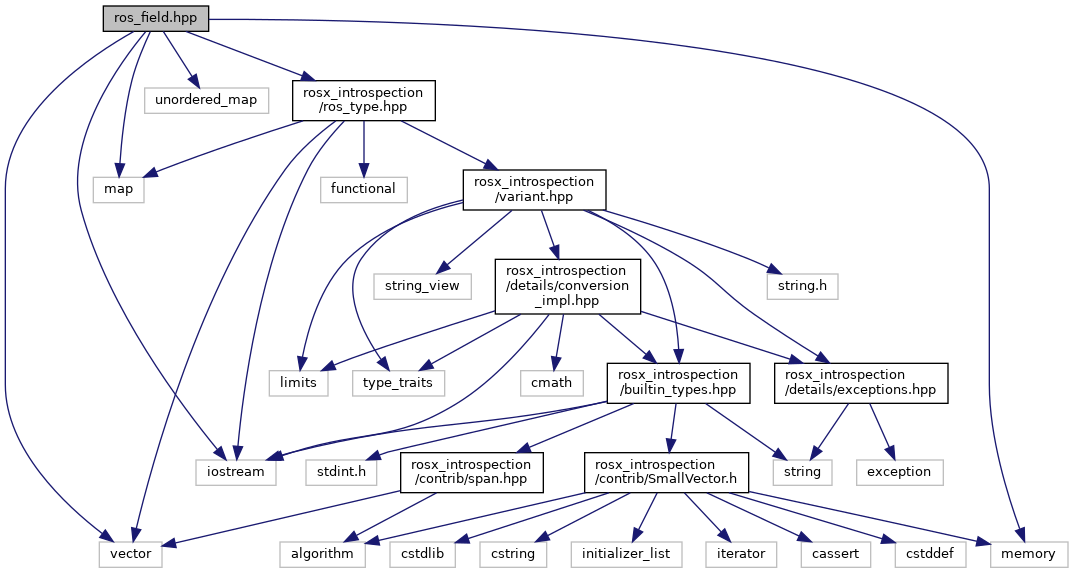
#include <vector>#include <map>#include <memory>#include <unordered_map>#include <iostream>#include "rosx_introspection/ros_type.hpp"
Include dependency graph for ros_field.hpp:
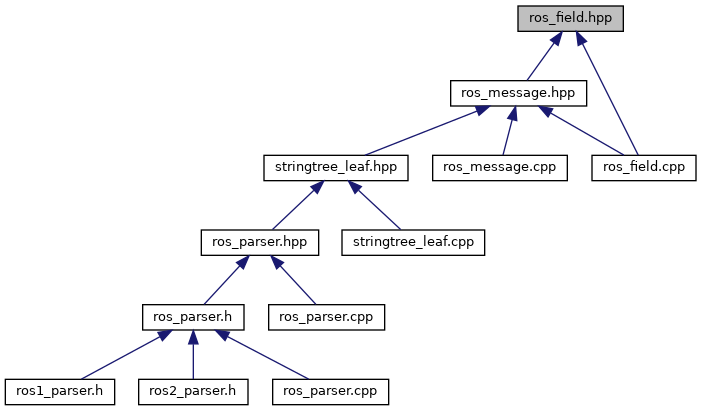
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RosMsgParser::ROSField |
| A ROSMessage will contain one or more ROSField(s). Each field is little more than a name / type pair. More... | |
Namespaces | |
| RosMsgParser | |
Typedefs | |
| using | RosMsgParser::RosMessageLibrary = std::unordered_map< ROSType, std::shared_ptr< ROSMessage > > |
Functions | |
| void | RosMsgParser::TrimString (std::string &s) |
| void | RosMsgParser::TrimStringLeft (std::string &s) |
| void | RosMsgParser::TrimStringRight (std::string &s) |