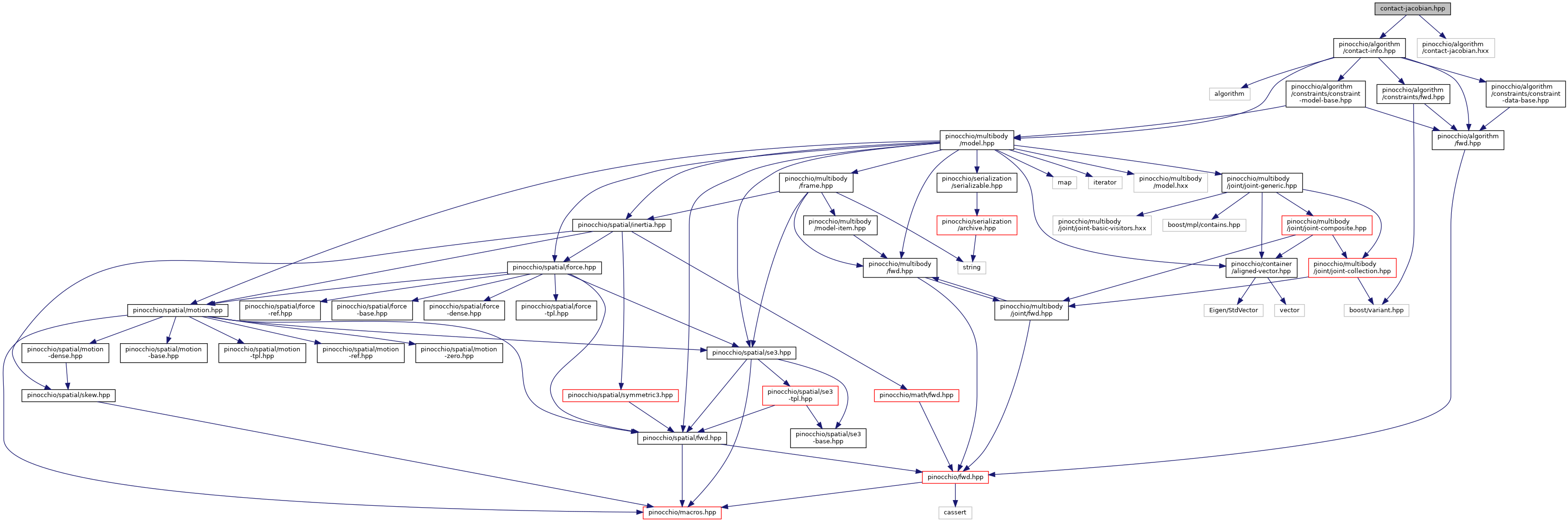
Include dependency graph for contact-jacobian.hpp:
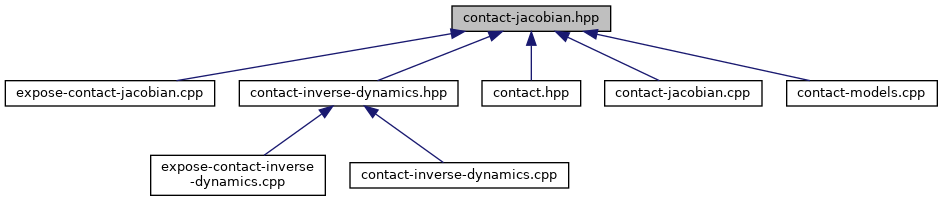
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename Matrix6Like > | |
| void | pinocchio::getConstraintJacobian (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const RigidConstraintModelTpl< Scalar, Options > &constraint_model, RigidConstraintDataTpl< Scalar, Options > &constraint_data, const Eigen::MatrixBase< Matrix6Like > &J) |
| Computes the kinematic Jacobian associatied to a given constraint model. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename DynamicMatrixLike , class ConstraintModelAllocator , class ConstraintDataAllocator > | |
| void | pinocchio::getConstraintsJacobian (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const std::vector< RigidConstraintModelTpl< Scalar, Options >, ConstraintDataAllocator > &constraint_model, std::vector< RigidConstraintDataTpl< Scalar, Options >, ConstraintDataAllocator > &constraint_data, const Eigen::MatrixBase< DynamicMatrixLike > &J) |
| Computes the kinematic Jacobian associatied to a given set of constraint models. More... | |