#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/algorithm/contact-dynamics.hxx"
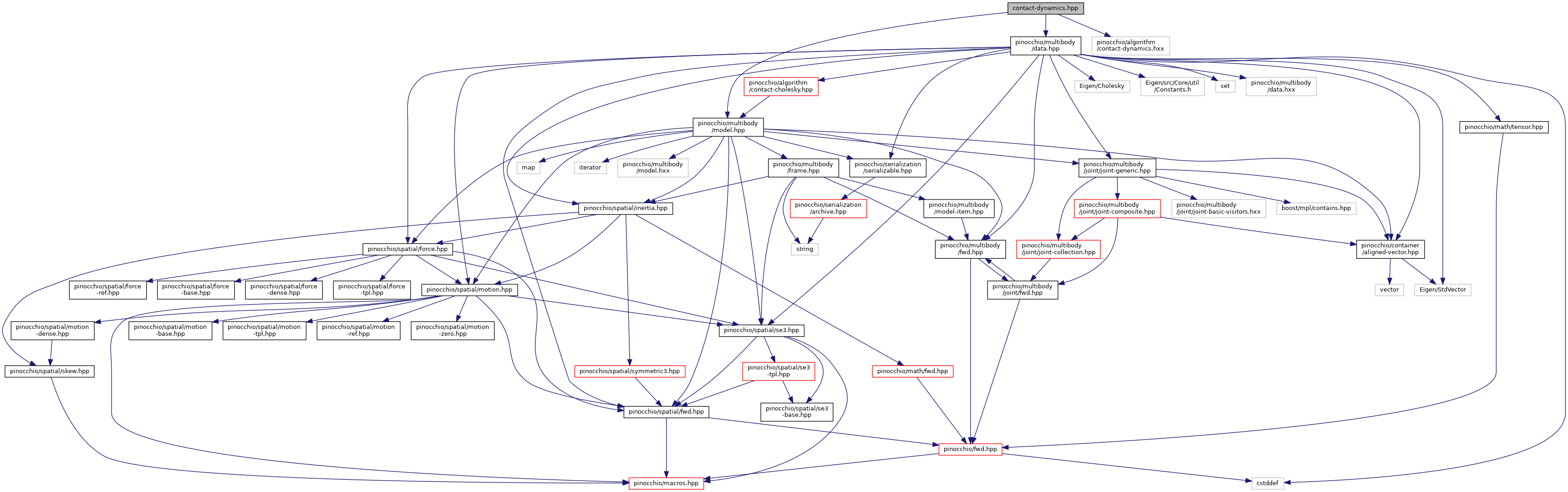
Include dependency graph for contact-dynamics.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename ConstraintMatrixType , typename KKTMatrixType > | |
| void | pinocchio::computeKKTContactDynamicMatrixInverse (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< ConstraintMatrixType > &J, const Eigen::MatrixBase< KKTMatrixType > &KKTMatrix_inv, const Scalar &inv_damping=0.) |
| Computes the inverse of the KKT matrix for dynamics with contact constraints. It computes the following matrix: More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType1 , typename TangentVectorType2 , typename ConstraintMatrixType , typename DriftVectorType > | |
| const PINOCCHIO_DEPRECATED DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::forwardDynamics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType1 > &v, const Eigen::MatrixBase< TangentVectorType2 > &tau, const Eigen::MatrixBase< ConstraintMatrixType > &J, const Eigen::MatrixBase< DriftVectorType > &gamma, const Scalar inv_damping=0.) |
| Compute the forward dynamics with contact constraints. Internally, pinocchio::computeAllTerms is called. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename TangentVectorType , typename ConstraintMatrixType , typename DriftVectorType > | |
| const PINOCCHIO_DEPRECATED DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::forwardDynamics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< TangentVectorType > &tau, const Eigen::MatrixBase< ConstraintMatrixType > &J, const Eigen::MatrixBase< DriftVectorType > &gamma, const Scalar inv_damping=0.) |
| Compute the forward dynamics with contact constraints, assuming pinocchio::computeAllTerms has been called. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConstraintMatrixType , typename KKTMatrixType > | |
| PINOCCHIO_DEPRECATED void | pinocchio::getKKTContactDynamicMatrixInverse (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConstraintMatrixType > &J, const Eigen::MatrixBase< KKTMatrixType > &KKTMatrix_inv) |
| Computes the inverse of the KKT matrix for dynamics with contact constraints. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType , typename ConstraintMatrixType > | |
| const PINOCCHIO_DEPRECATED DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::impulseDynamics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v_before, const Eigen::MatrixBase< ConstraintMatrixType > &J, const Scalar r_coeff=0., const Scalar inv_damping=0.) |
| Compute the impulse dynamics with contact constraints. Internally, pinocchio::crba is called. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType , typename ConstraintMatrixType > | |
| const PINOCCHIO_DEPRECATED DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::impulseDynamics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< TangentVectorType > &v_before, const Eigen::MatrixBase< ConstraintMatrixType > &J, const Scalar r_coeff=0., const Scalar inv_damping=0.) |
| Compute the impulse dynamics with contact constraints, assuming pinocchio::crba has been called. More... | |