Simple non-linear optimizer to find the SE(3) optimal transformation. More...
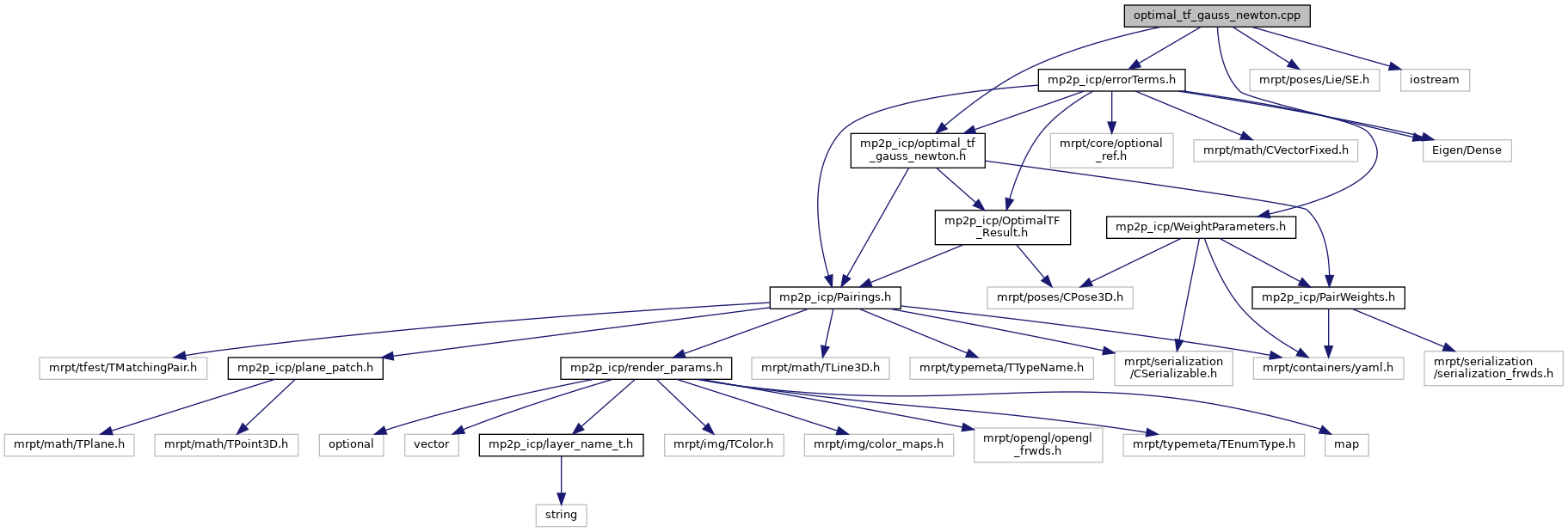
#include <mp2p_icp/errorTerms.h>#include <mp2p_icp/optimal_tf_gauss_newton.h>#include <mrpt/poses/Lie/SE.h>#include <Eigen/Dense>#include <iostream>
Include dependency graph for optimal_tf_gauss_newton.cpp:
Go to the source code of this file.
Detailed Description
Simple non-linear optimizer to find the SE(3) optimal transformation.
- Date
- Jun 16, 2019
Definition in file optimal_tf_gauss_newton.cpp.