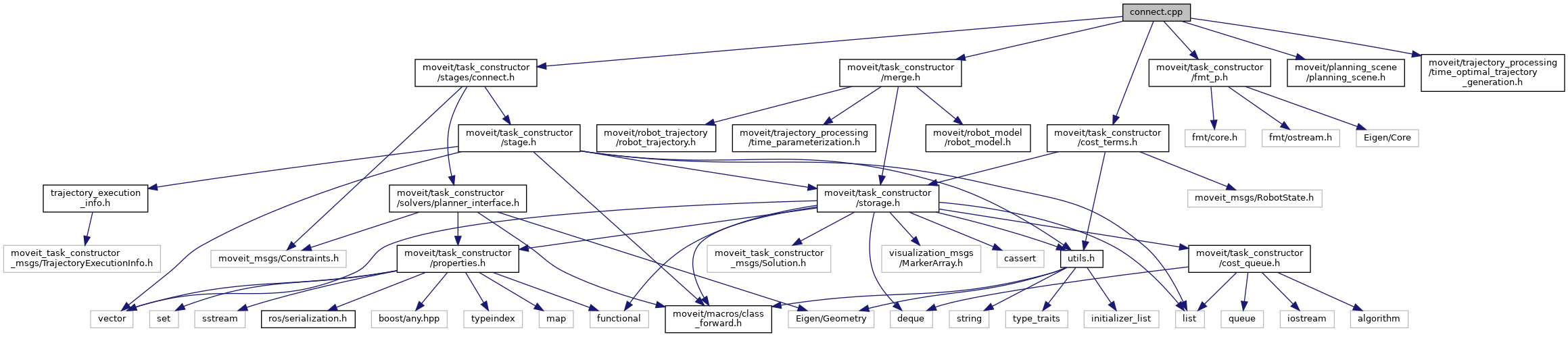
#include <moveit/task_constructor/stages/connect.h>#include <moveit/task_constructor/merge.h>#include <moveit/task_constructor/cost_terms.h>#include <moveit/task_constructor/fmt_p.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit/trajectory_processing/time_optimal_trajectory_generation.h>
Include dependency graph for connect.cpp:
Go to the source code of this file.
Namespaces | |
| moveit | |
| moveit::task_constructor | |
| moveit::task_constructor::stages | |