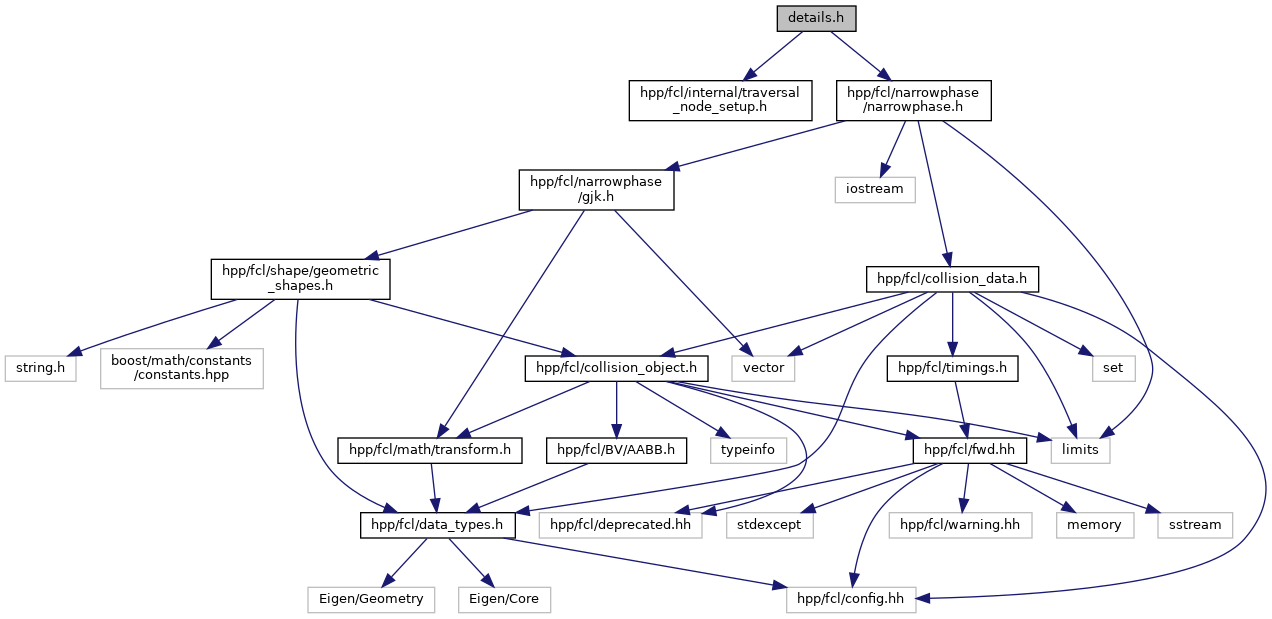
Include dependency graph for details.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | hpp::fcl::details::ContactPoint |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
| hpp::fcl::details | |
Functions | |
| unsigned int | hpp::fcl::details::boxBox2 (const Vec3f &halfSide1, const Matrix3f &R1, const Vec3f &T1, const Vec3f &halfSide2, const Matrix3f &R2, const Vec3f &T2, Vec3f &normal, FCL_REAL *depth, int *return_code, unsigned int maxc, std::vector< ContactPoint > &contacts) |
| bool | hpp::fcl::details::boxBoxIntersect (const Box &s1, const Transform3f &tf1, const Box &s2, const Transform3f &tf2, Vec3f *contact_points, FCL_REAL *penetration_depth_, Vec3f *normal_) |
| bool | hpp::fcl::details::boxHalfspaceIntersect (const Box &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2) |
| box half space, a, b, c = +/- edge size n^T * (R(o + a v1 + b v2 + c v3) + T) <= d so (R^T n) (a v1 + b v2 + c v3) + n * T <= d check whether d - n * T - (R^T n) (a v1 + b v2 + c v3) >= 0 for some a, b, c the max value of left side is d - n * T + |(R^T n) (a v1 + b v2 + c v3)|, check that is enough More... | |
| bool | hpp::fcl::details::boxHalfspaceIntersect (const Box &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::boxPlaneIntersect (const Box &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| box half space, a, b, c = +/- edge size n^T * (R(o + a v1 + b v2 + c v3) + T) ~ d so (R^T n) (a v1 + b v2 + c v3) + n * T ~ d check whether d - n * T - (R^T n) (a v1 + b v2 + c v3) >= 0 for some a, b, c and <=0 for some a, b, c so need to check whether |d - n * T| <= |(R^T n)(a v1 + b v2 + c v3)|, the reason is as follows: (R^T n) (a v1 + b v2 + c v3) can get |(R^T n) (a v1 + b v2 + c v3)| for one a, b, c. if |d - n * T| <= |(R^T n)(a v1 + b v2 + c v3)| then can get both positive and negative value on the right side. More... | |
| bool | hpp::fcl::details::boxSphereDistance (const Box &b, const Transform3f &tfb, const Sphere &s, const Transform3f &tfs, FCL_REAL &dist, Vec3f &pb, Vec3f &ps, Vec3f &normal) |
| bool | hpp::fcl::details::capsuleHalfspaceIntersect (const Capsule &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::capsulePlaneIntersect (const Capsule &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::compareContactPoints (const ContactPoint &c1, const ContactPoint &c2) |
| FCL_REAL | hpp::fcl::details::computePenetration (const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, const Vec3f &Q1, const Vec3f &Q2, const Vec3f &Q3, const Transform3f &tf1, const Transform3f &tf2, Vec3f &normal) |
| FCL_REAL | hpp::fcl::details::computePenetration (const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, const Vec3f &Q1, const Vec3f &Q2, const Vec3f &Q3, Vec3f &normal) |
| See the prototype below. More... | |
| bool | hpp::fcl::details::coneHalfspaceIntersect (const Cone &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::conePlaneIntersect (const Cone &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::convexHalfspaceIntersect (const ConvexBase &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, Vec3f *contact_points, FCL_REAL *penetration_depth, Vec3f *normal) |
| bool | hpp::fcl::details::convexPlaneIntersect (const ConvexBase &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, Vec3f *contact_points, FCL_REAL *penetration_depth, Vec3f *normal) |
| static void | hpp::fcl::details::cullPoints2 (unsigned int n, FCL_REAL p[], unsigned int m, unsigned int i0, unsigned int iret[]) |
| bool | hpp::fcl::details::cylinderHalfspaceIntersect (const Cylinder &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::cylinderPlaneIntersect (const Cylinder &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| cylinder-plane intersect n^T (R (r * cosa * v1 + r * sina * v2 + h * v3) + T) ~ d need one point to be positive and one to be negative (n^T * v3) * h + n * T -d + r * (cosa * (n^T * R * v1) + sina * (n^T * R * v2)) ~ 0 (n^T * v3) * h + r * (cosa * (n^T * R * v1) + sina * (n^T * R * v2)) + n * T - d ~ 0 More... | |
| bool | hpp::fcl::details::halfspaceDistance (const Halfspace &h, const Transform3f &tf1, const ShapeBase &s, const Transform3f &tf2, FCL_REAL &dist, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::halfspaceIntersect (const Halfspace &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, Vec3f &p, Vec3f &d, Halfspace &s, FCL_REAL &penetration_depth, int &ret) |
| template<typename T > | |
| T | hpp::fcl::details::halfspaceIntersectTolerance () |
| template<> | |
| float | hpp::fcl::details::halfspaceIntersectTolerance () |
| bool | hpp::fcl::details::halfspacePlaneIntersect (const Halfspace &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, Plane &pl, Vec3f &p, Vec3f &d, FCL_REAL &penetration_depth, int &ret) |
| bool | hpp::fcl::details::halfspaceTriangleIntersect (const Halfspace &s1, const Transform3f &tf1, const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| static unsigned int | hpp::fcl::details::intersectRectQuad2 (FCL_REAL h[2], FCL_REAL p[8], FCL_REAL ret[16]) |
| static void | hpp::fcl::details::lineClosestApproach (const Vec3f &pa, const Vec3f &ua, const Vec3f &pb, const Vec3f &ub, FCL_REAL *alpha, FCL_REAL *beta) |
| static void | hpp::fcl::details::lineSegmentPointClosestToPoint (const Vec3f &p, const Vec3f &s1, const Vec3f &s2, Vec3f &sp) |
| bool | hpp::fcl::details::planeHalfspaceIntersect (const Plane &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, Plane &pl, Vec3f &p, Vec3f &d, FCL_REAL &penetration_depth, int &ret) |
| return whether plane collides with halfspace if the separation plane of the halfspace is parallel with the plane return code 1, if the plane's normal is the same with halfspace's normal and plane is inside halfspace, also return plane in pl return code 2, if the plane's normal is oppositie to the halfspace's normal and plane is inside halfspace, also return plane in pl plane is outside halfspace, collision-free if not parallel return the intersection ray, return code 3. ray origin is p and direction is d More... | |
| bool | hpp::fcl::details::planeIntersect (const Plane &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, Vec3f *, FCL_REAL *, Vec3f *) |
| template<typename T > | |
| T | hpp::fcl::details::planeIntersectTolerance () |
| template<> | |
| double | hpp::fcl::details::planeIntersectTolerance< double > () |
| template<> | |
| float | hpp::fcl::details::planeIntersectTolerance< float > () |
| bool | hpp::fcl::details::planeTriangleIntersect (const Plane &s1, const Transform3f &tf1, const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::projectInTriangle (const Vec3f &p1, const Vec3f &p2, const Vec3f &p3, const Vec3f &normal, const Vec3f &p) |
| Whether a point's projection is in a triangle. More... | |
| FCL_REAL | hpp::fcl::details::segmentSqrDistance (const Vec3f &from, const Vec3f &to, const Vec3f &p, Vec3f &nearest) |
| the minimum distance from a point to a line More... | |
| bool | hpp::fcl::details::sphereCapsuleDistance (const Sphere &s1, const Transform3f &tf1, const Capsule &s2, const Transform3f &tf2, FCL_REAL &dist, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::sphereCapsuleIntersect (const Sphere &s1, const Transform3f &tf1, const Capsule &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f *contact_points, Vec3f *normal_) |
| bool | hpp::fcl::details::sphereCylinderDistance (const Sphere &s1, const Transform3f &tf1, const Cylinder &s2, const Transform3f &tf2, FCL_REAL &dist, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::sphereHalfspaceIntersect (const Sphere &s1, const Transform3f &tf1, const Halfspace &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::spherePlaneIntersect (const Sphere &s1, const Transform3f &tf1, const Plane &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::sphereSphereDistance (const Sphere &s1, const Transform3f &tf1, const Sphere &s2, const Transform3f &tf2, FCL_REAL &dist, Vec3f &p1, Vec3f &p2, Vec3f &normal) |
| bool | hpp::fcl::details::sphereSphereIntersect (const Sphere &s1, const Transform3f &tf1, const Sphere &s2, const Transform3f &tf2, FCL_REAL &distance, Vec3f *contact_points, Vec3f *normal) |
| bool | hpp::fcl::details::sphereTriangleDistance (const Sphere &sp, const Transform3f &tf, const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, FCL_REAL *dist) |
| bool | hpp::fcl::details::sphereTriangleDistance (const Sphere &sp, const Transform3f &tf, const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, FCL_REAL *dist, Vec3f *p1, Vec3f *p2) |
| bool | hpp::fcl::details::sphereTriangleDistance (const Sphere &sp, const Transform3f &tf1, const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, const Transform3f &tf2, FCL_REAL *dist, Vec3f *p1, Vec3f *p2) |
| bool | hpp::fcl::details::sphereTriangleIntersect (const Sphere &s, const Transform3f &tf1, const Vec3f &P1, const Vec3f &P2, const Vec3f &P3, FCL_REAL &distance, Vec3f &p1, Vec3f &p2, Vec3f &normal_) |