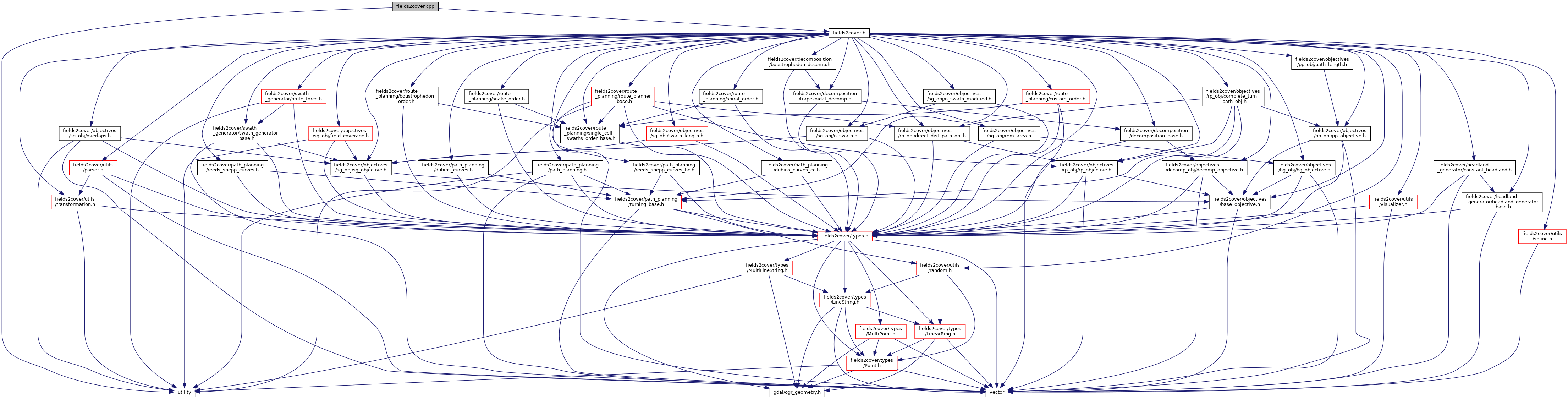
Include dependency graph for fields2cover.cpp:
Go to the source code of this file.
Namespaces | |
| f2c | |
| Main namespace of the fields2cover library. | |
Functions | |
| std::unique_ptr< f2c::pp::TurningBase > | f2c::getPPTurningBasePtr (const Options &opt) |
| std::unique_ptr< obj::SGObjective > | f2c::getSGObjPtr (const Options &opt) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CCell &cell, const Options &opt=Options()) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CCells &cells, const Options &opt=Options()) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CField &field, bool local_crs) |
| F2CPath | f2c::planCovPath (const F2CRobot &robot, const F2CField &field, const Options &opt=Options(), bool local_crs=true) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CCell &cell, const Options &opt=Options()) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CCells &cells, const Options &opt=Options()) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CField &field, bool local_crs) |
| F2CRoute | f2c::planCovRoute (const F2CRobot &robot, const F2CField &field, const Options &opt=Options(), bool local_crs=true) |