Introduction
The dynamic-graph package is used to connect computation nodes, "entities" together using a graph system, akin to what Simulink does. Entities are connected through input and output signals. With the building blocks this package provides, you can easily create a full computation graph for a given problem. It is the basis for the stack of tasks operation.
Exemple: Real-time control
To give a more concrete example, the real-time control used by the Gepetto group for the humanoid robot HRP-2 is detailled.
Real-time control system are usually driven by a cyclic computational node which needs to send a control reference value to each motors of a robot. To compute this control reference values, sensor values need to be provided. In the Stack-Of-Tasks special entities called Device are used to provide an abstract interface to the hardware.
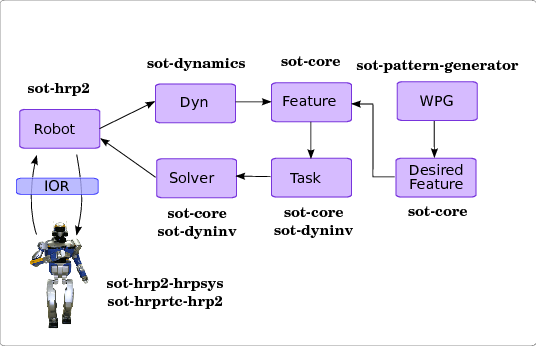
A scheme of the real-time control graph used for the humanoid robot HRP-2 is depicted in the following figure:
You can find an example of a real example of control graph at Displaying the graph of entities.
The device therefore has a specific input which should contain the control vector. This control vector is the result of a computation solving a control problem. The entity in charge of solving this control problem is called "Solver" in the previous figure. In the SoT framework it is often cast as an optimization problem. This optimization problem is build using a control "Task" (not to be confused with the general word task). A control "Task" regulates the difference with a "Feature" computed on the current robot state and a "Desired Feature". For instance when walking, the regulated feature is the robot's Center-Of-Mass (CoM) position. The "Feature" is computed using a library using the robot model and the sensor value. The entity making this computation is "Dyn". A walking pattern generator using foot-steps position given in advance generates the desired value for the CoM. Note that the "Dyn" entity uses the sensor provided by the entity "Robot".
From a pure computer science viewpoint we wish to avoid recomputing data such as articular Jacobians when this is unnecessary. Therefore the data generated by an entity through signals may have two types of dependencies: one dependency related to time and dependencies on other signals. Internally an entity does not recompute the data if no new information is available, it is simply providing the same information computed before. Please note that this package provides only the computational framework to realize the data dependency and the entities. Solvers, libraries to compute mechanical quantities are provided in different packages.
Finally in order to dynamically create a graph, it is possible on-line to load classes of entities and create instances of entities.
Functionnalities
- Support for extensions and modules using dynamic link libraries
- Template-based signal definition, independent
- Type-safe connection of input and output signals
- On-demand signal computation as well as a caching system for signal values allow fast computation of signal values, which is a critical point for real-time systems