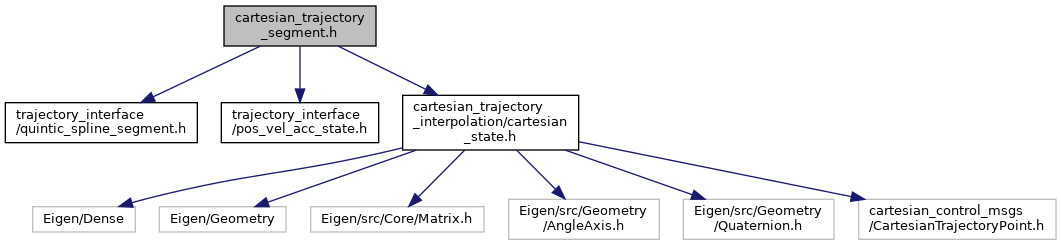
#include <trajectory_interface/quintic_spline_segment.h>#include <trajectory_interface/pos_vel_acc_state.h>#include <cartesian_trajectory_interpolation/cartesian_state.h>
Include dependency graph for cartesian_trajectory_segment.h:
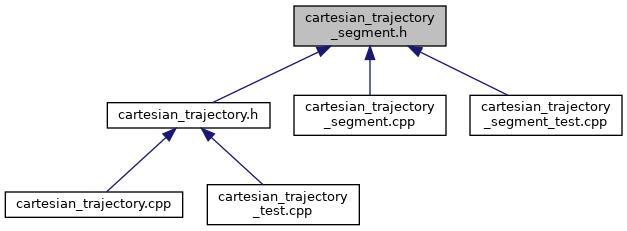
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ros_controllers_cartesian::CartesianTrajectorySegment |
| Cartesian segment between two trajectory waypoints. More... | |
Namespaces | |
| ros_controllers_cartesian | |
Typedefs | |
| using | ros_controllers_cartesian::QuinticSplineSegment = trajectory_interface::QuinticSplineSegment< double > |
| 7-dimensional quintic spline segment More... | |
Functions | |
| CartesianTrajectorySegment::SplineState | ros_controllers_cartesian::convert (const CartesianState &state) |
| Convert a CartesianState into a ros_controllers_cartesian::SplineState. More... | |
| CartesianState | ros_controllers_cartesian::convert (const CartesianTrajectorySegment::SplineState &state) |
| Convert a ros_controllers_cartesian::SplineState into a CartesianState. More... | |
| std::ostream & | ros_controllers_cartesian::operator<< (std::ostream &os, const CartesianTrajectorySegment::SplineState &state) |
| Stream operator for testing and debugging. More... | |
Detailed Description
- Date
- 2021/01/14
Definition in file cartesian_trajectory_segment.h.