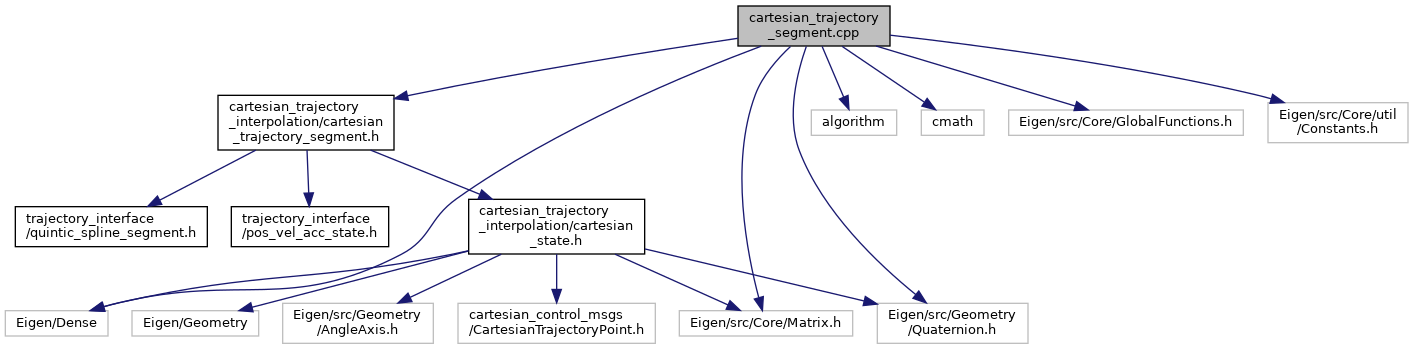
#include <cartesian_trajectory_interpolation/cartesian_trajectory_segment.h>#include <algorithm>#include <cmath>#include "Eigen/src/Core/GlobalFunctions.h"#include "Eigen/src/Core/Matrix.h"#include "Eigen/src/Core/util/Constants.h"#include "Eigen/src/Geometry/Quaternion.h"#include <Eigen/Dense>
Include dependency graph for cartesian_trajectory_segment.cpp:
Go to the source code of this file.
Namespaces | |
| ros_controllers_cartesian | |
Typedefs | |
| using | ros_controllers_cartesian::SplineState = CartesianTrajectorySegment::SplineState |
| using | ros_controllers_cartesian::Time = CartesianTrajectorySegment::Time |
Functions | |
| CartesianTrajectorySegment::SplineState | ros_controllers_cartesian::convert (const CartesianState &state) |
| Convert a CartesianState into a ros_controllers_cartesian::SplineState. More... | |
| CartesianState | ros_controllers_cartesian::convert (const CartesianTrajectorySegment::SplineState &state) |
| Convert a ros_controllers_cartesian::SplineState into a CartesianState. More... | |
| std::ostream & | ros_controllers_cartesian::operator<< (std::ostream &os, const CartesianTrajectorySegment::SplineState &state) |
| Stream operator for testing and debugging. More... | |
Detailed Description
- Date
- 2021/01/20
Definition in file cartesian_trajectory_segment.cpp.