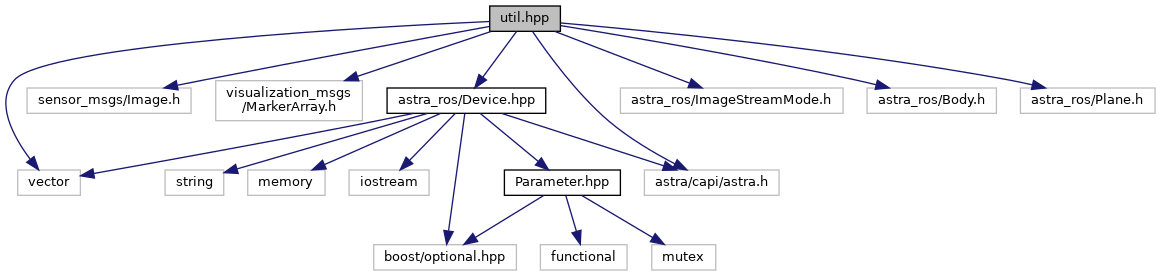
#include <vector>#include <sensor_msgs/Image.h>#include <visualization_msgs/MarkerArray.h>#include "astra_ros/Device.hpp"#include "astra_ros/ImageStreamMode.h"#include "astra_ros/Body.h"#include "astra_ros/Plane.h"#include <astra/capi/astra.h>
Include dependency graph for util.hpp:
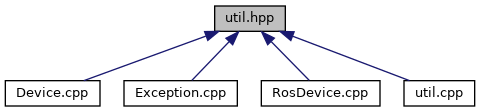
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| astra_ros | |
Functions | |
| Device::ImageStreamMode | astra_ros::fromRos (const ImageStreamMode &image_stream_mode) |
| const std::string & | astra_ros::statusToString (const astra_status_t status) |
| std::vector< Body > | astra_ros::toRos (const astra_body_list_t &body_list, const std_msgs::Header &header) |
| Body | astra_ros::toRos (const astra_body_t &body, const std_msgs::Header &header) |
| sensor_msgs::Image | astra_ros::toRos (const astra_floormask_t &floor_mask) |
| Plane | astra_ros::toRos (const astra_plane_t &plane) |
| sensor_msgs::Image | astra_ros::toRos (const astra_rgba_pixel_t *const data, const std::size_t length, const astra_image_metadata_t &metadata) |
| ImageStreamMode | astra_ros::toRos (const Device::ImageStreamMode &image_stream_mode) |
| sensor_msgs::Image | astra_ros::toRos (const std::int16_t *const data, const std::size_t length, const astra_image_metadata_t &metadata) |
| sensor_msgs::Image | astra_ros::toRos (const std::uint8_t *const data, const std::size_t length, const astra_image_metadata_t &metadata) |