#include <vcg/math/gen_normal.h>#include <vcg/math/random_generator.h>#include <vcg/space/index/grid_static_ptr.h>#include <vcg/complex/trimesh/closest.h>#include <vcg/complex/trimesh/point_sampling.h>#include <vcg/space/index/spatial_hashing.h>#include <vcg/complex/trimesh/stat.h>#include <vcg/complex/trimesh/update/topology.h>#include <vcg/complex/trimesh/update/normal.h>#include <vcg/complex/trimesh/update/flag.h>#include <vcg/space/box2.h>#include <vcg/space/segment2.h>#include <qdatetime.h>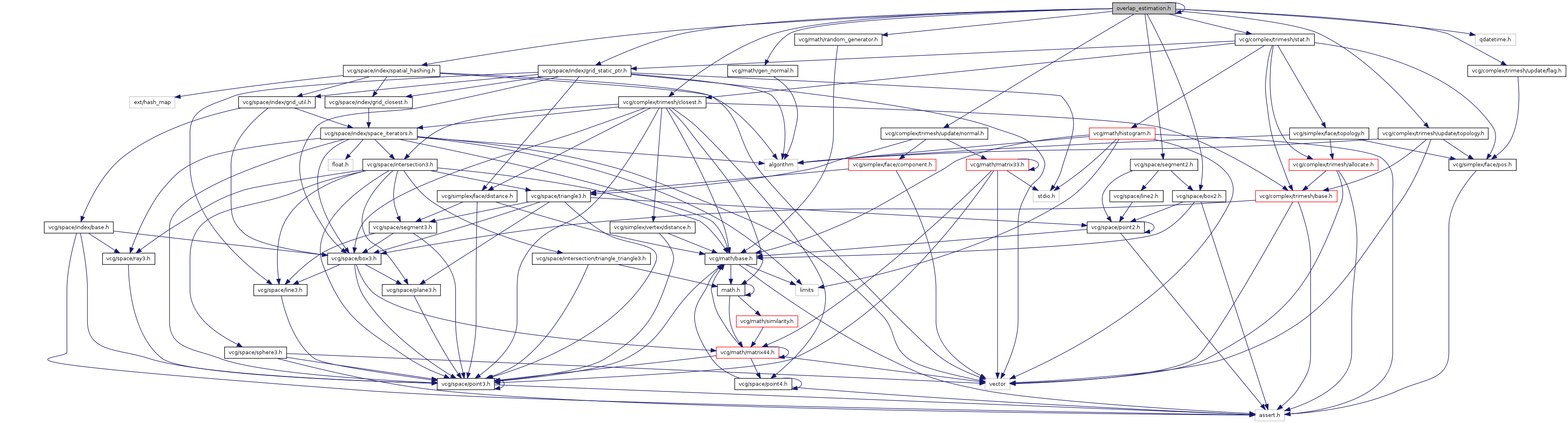
Go to the source code of this file.
Classes | |
| class | OverlapEstimation< MESH_TYPE > |
| This class provides a strategy to estimate the overlap percentage of two range maps/point clouds. More... | |
| class | OverlapEstimation< MESH_TYPE >::Parameters |
| Public class to hold parameters. Used to avoid endless list of parameters inside functions. More... | |
| class | OverlapEstimation< MESH_TYPE >::VertexPointerSampler |

